 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncreasing Impact by Mechanical Resonance for Teleoperated Hammering
Paper and Code
Nov 16, 2018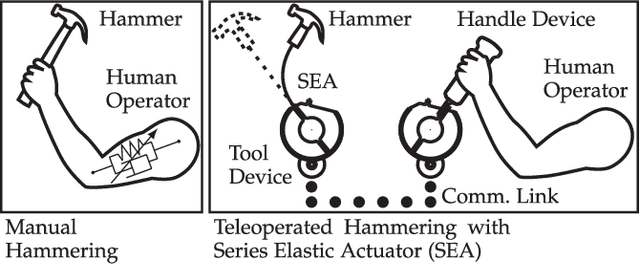
Series elastic actuators (SEAs) are interesting for usage in harsh environments as they are more robust than rigid actuators. This paper shows how SEAs can be used in teleoperation to increase output velocity in dynamic tasks. A first experiment is presented that tested human ability to achieve higher hammerhead velocities with a flexible hammer than with a rigid hammer, and to evaluate the influence of the resonance frequency. In this experiment, 13 participants executed a hammering task in direct manipulation using flexible hammers in four conditions with resonance frequencies of 3.0 Hz to 9.9 Hz and one condition with a rigid hammer. Then, a second experiment is presented that tested the ability of 32 participants to reproduce the findings of the first experiment in teleoperated manipulation with different feedback conditions: with visual and force feedback, without visual feedback, without force feedback, and with a communication delay of 40 ms. The results indicate that humans can exploit the mechanical resonance of a flexible system to at least double the output velocity without combined force and vision feedback. This is an unexpected result, allowing the design of simpler and more robust teleoperators for dynamic tasks.