 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental Evidence that Empowerment May Drive Exploration in Sparse-Reward Environments
Jul 14, 2021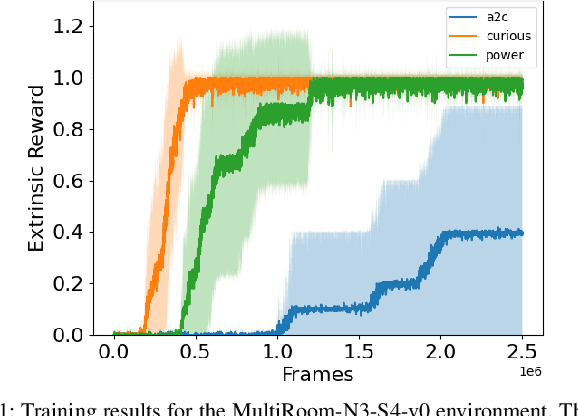
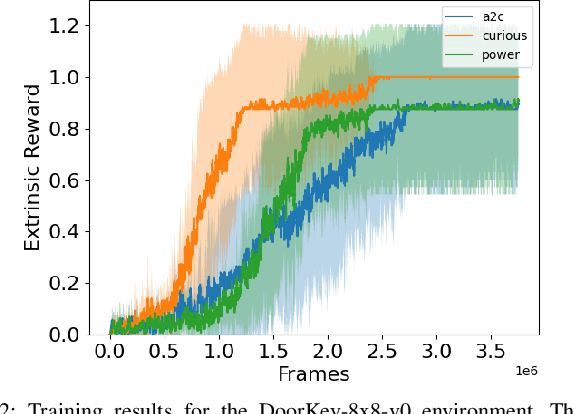
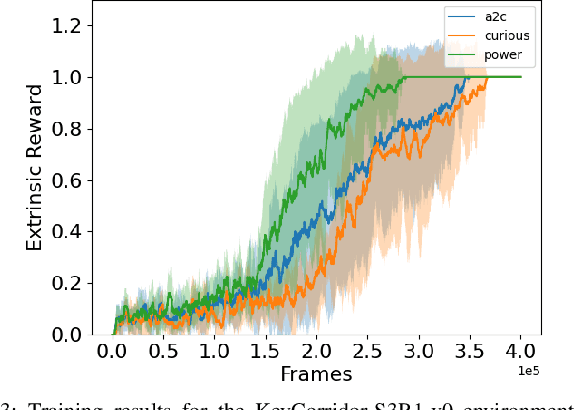
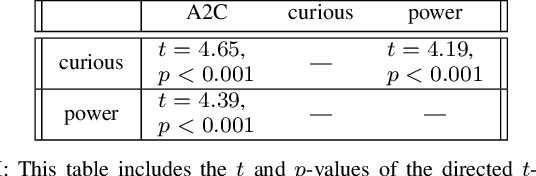
Reinforcement Learning (RL) is known to be often unsuccessful in environments with sparse extrinsic rewards. A possible countermeasure is to endow RL agents with an intrinsic reward function, or 'intrinsic motivation', which rewards the agent based on certain features of the current sensor state. An intrinsic reward function based on the principle of empowerment assigns rewards proportional to the amount of control the agent has over its own sensors. We implemented a variation on a recently proposed intrinsically motivated agent, which we refer to as the 'curious' agent, and an empowerment-inspired agent. The former leverages sensor state encoding with a variational autoencoder, while the latter predicts the next sensor state via a variational information bottleneck. We compared the performance of both agents to that of an advantage actor-critic baseline in four sparse reward grid worlds. Both the empowerment agent and its curious competitor seem to benefit to similar extents from their intrinsic rewards. This provides some experimental support to the conjecture that empowerment can be used to drive exploration.
A macro agent and its actions
Mar 31, 2020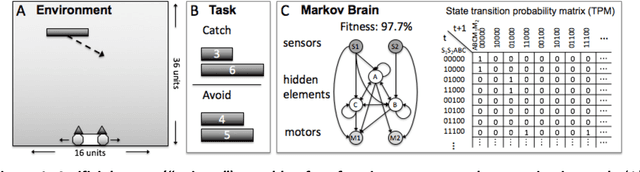
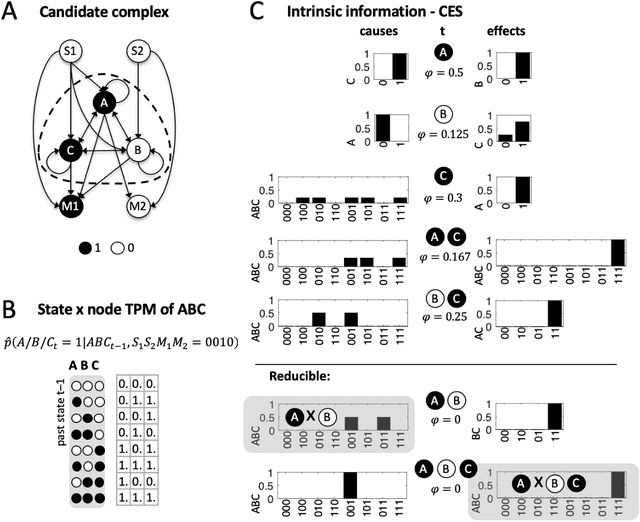
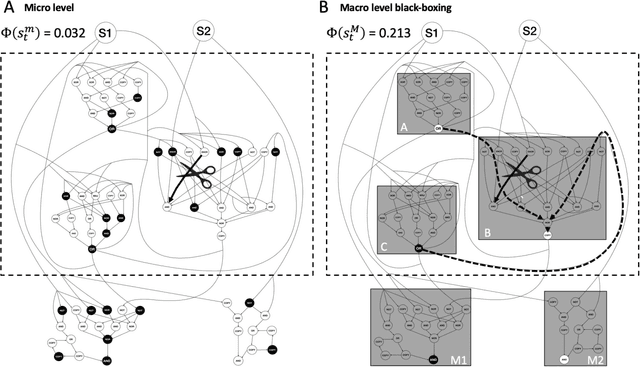
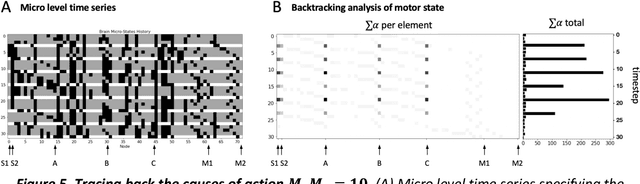
In science, macro level descriptions of the causal interactions within complex, dynamical systems are typically deemed convenient, but ultimately reducible to a complete causal account of the underlying micro constituents. Yet, such a reductionist perspective is hard to square with several issues related to autonomy and agency: (1) agents require (causal) borders that separate them from the environment, (2) at least in a biological context, agents are associated with macroscopic systems, and (3) agents are supposed to act upon their environment. Integrated information theory (IIT) (Oizumi et al., 2014) offers a quantitative account of causation based on a set of causal principles, including notions such as causal specificity, composition, and irreducibility, that challenges the reductionist perspective in multiple ways. First, the IIT formalism provides a complete account of a system's causal structure, including irreducible higher-order mechanisms constituted of multiple system elements. Second, a system's amount of integrated information ($\Phi$) measures the causal constraints a system exerts onto itself and can peak at a macro level of description (Hoel et al., 2016; Marshall et al., 2018). Finally, the causal principles of IIT can also be employed to identify and quantify the actual causes of events ("what caused what"), such as an agent's actions (Albantakis et al., 2019). Here, we demonstrate this framework by example of a simulated agent, equipped with a small neural network, that forms a maximum of $\Phi$ at a macro scale.