 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeElectromagnetic Modelling of Extended Targets in a Distributed Antenna System
Apr 30, 2025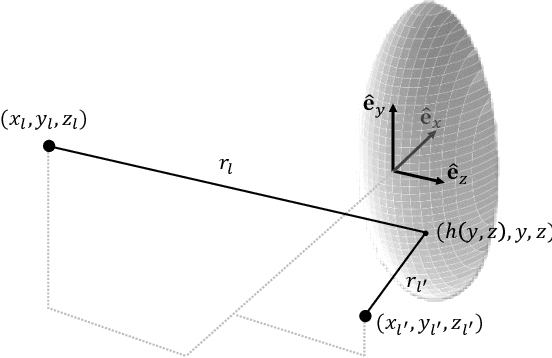
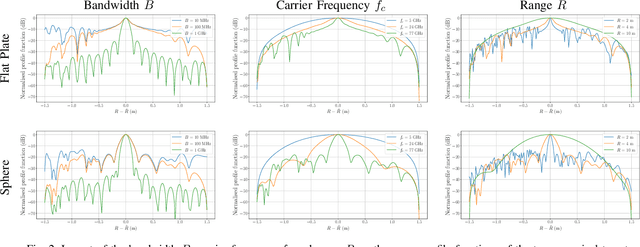
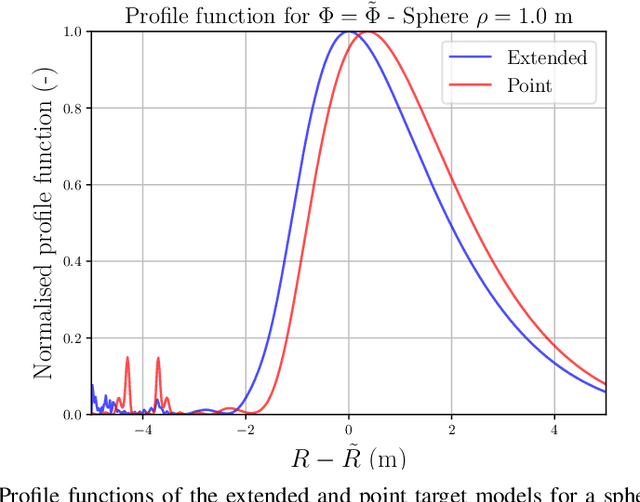
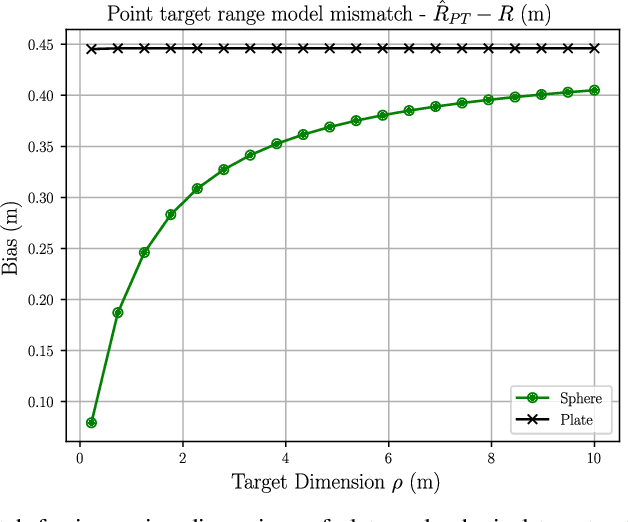
Traditional radar and integrated sensing and communication (ISAC) systems often approximate targets as point sources, a simplification that fails to capture the essential scattering characteristics for many applications. This paper presents a novel electromagnetic (EM)-based framework to accurately model the near-field (NF) scattering response of extended targets, which is then applied to three canonical shapes : a flat rectangular plate, a sphere and a cylinder. Mathematical expressions for the received signal are provided in each case. Based on this model, the influence of bandwidth, carrier frequency and target distance on localisation accuracy is analysed, showing how higher bandwidths and carrier frequencies improve resolution. Additionally, the impact of target curvature on localisation performance is studied. Results indicate that detection performance is slightly enhanced when considering curved objects. A comparative analysis between the extended and point target models shows significant similarities when targets are small and curved. However, as the target size increases or becomes flatter, the point target model introduces estimation errors owing to model mismatch. The impact of this model mismatch as a function of system parameters is analysed, and the operational zones where the point abstraction remains valid and where it breaks down are identified. These findings provide theoretical support for experimental results based on point-target models in previous studies.
Interference Cancellation Schemes for Full-Duplex Integrated Sensing and Communication
Oct 01, 2024



In this paper, the introduction of interference cancellation in full-duplex joint radar and communication receivers is analysed. More specifically, a focus is made on scenarios in which the receiver simultaneously receives radar echoes from the environment, and communication signals from other joint radar and communication transceivers. First, the phase-coded frequency modulated continuous wave waveform designed for integrated sensing and communication is presented. Then, simple structures in which interference cancellation is only applied at the radar or communication function are proposed, relying on the information gathered at the other function. The detection probability and bit error rate improvements are analysed numerically w.r.t. different system parameters, such as the communication constellation, or the number of transmitted pulses. The introduction of error correcting codes is also considered. Next, iterative interference cancellation structures are investigated. Thanks to multiple interference cancellation layers, both the radar and communication performance are improved, and the robustness of the system to any scenario is enhanced. This is shown numerically through the analysis of the performance achieved by simple and iterative structures, which are compared for different radar echo to communication signal power ratio. Finally, a dynamic automotive scenario is considered. Leveraging on previous radar measurements, the parameters of the radar echo are inferred, and it is reconstructed beforehand, enabling to remove the first radar processing block. The complexity of the iterative structures is thus reduced, at the price of a slight performance reduction. A dynamic automotive scenario is considered, highlighting the impact of the tracking of the next vehicle ahead on the system.
Full-Duplex V2X Integrated Sensing and Communication Scenario: Stochastic geometry, Monte-Carlo, and Ray-Tracing Comparison
Jul 09, 2024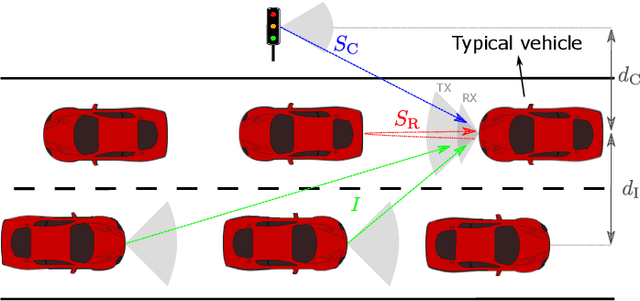
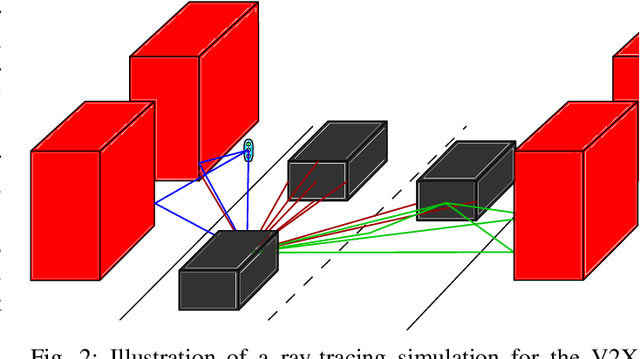
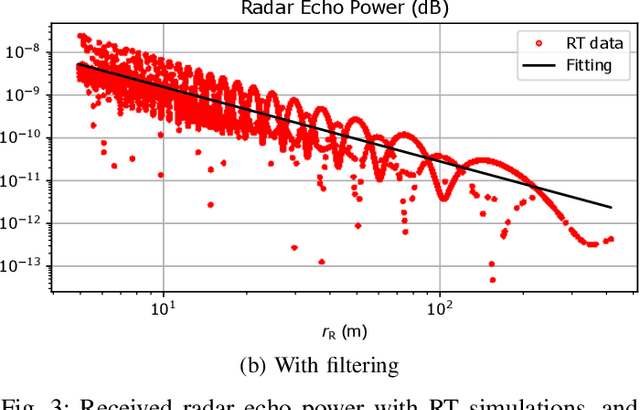
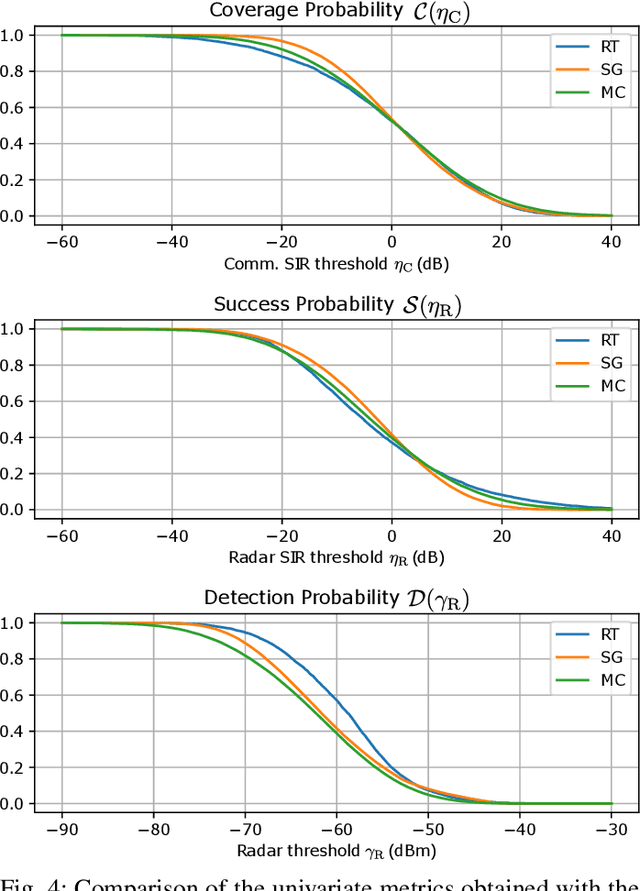
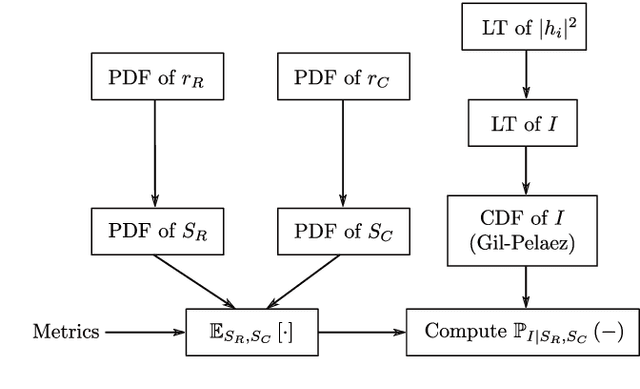
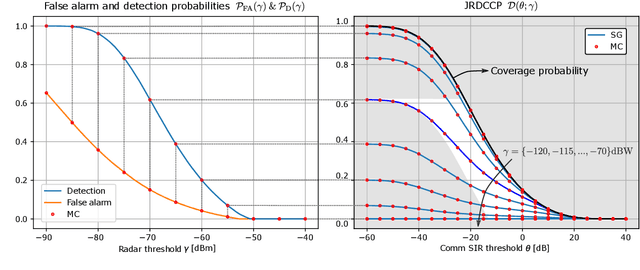
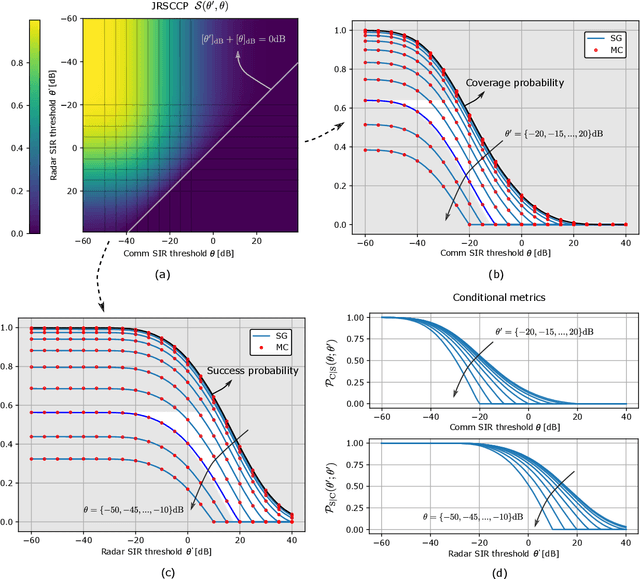
In this paper, performance of an Integrated Sensing and Communication (ISAC) Vehicle-to-Everything (V2X) scenario is evaluated, in which a vehicle simultaneously detects the next vehicle ahead while receiving a communication signal from a RoadSide Unit (RSU) of the infrastructure. Univariate and joint radar and communication performance metrics are evaluated within three different frameworks, namely the Stochastic Geometry (SG), Monte-Carlo (MC), and Ray-Tracing (RT) frameworks. The parameters of the system model are extracted from the RT simulations, and the metrics are compared to assess the accuracy of the SG framework. It is shown that the SG and MC system models are relevant w.r.t. RT simulations for the evaluation of univariate communication and sensing metrics, but larger discrepancies are observed for the joint metrics.
Performance Bounds for Near-Field Multi-Antenna Range Estimation of Extended Targets
Apr 12, 2024



In this paper, performance bounds for the multi-antenna near-field range estimation of extended targets are provided. First, analytic expressions of the ambiguity functions are obtained, emphasising the cooperation between the waveform delay and the near-field phase shift information. The impact of estimating the range of an extended target with a point target model is analysed, showing that a model mismatch leads to severe performance degradation in the near-field region. Secondly, Cramer-Rao bounds are derived. Expressions emphasising the parameters' impact are obtained, the parameters being the carrier frequency, and the central frequency and root-mean-square bandwidth of the waveform. The near-field range information is shown to depend on the root-mean-square value of the propagation delay derivatives, this value scaling with the fourth power of the ratio between the antenna array dimension and the target range.
Near-Field EM-Based Multistatic Radar Range Estimation
Mar 27, 2024



Radar targets are traditionally modelled as point target reflectors, even in the near-field region. Yet, for radar systems operating at high carrier frequencies and small distances, traditional radar propagation models do not accurately model the scatterer responses. In this paper, a novel electromagnetic-based model is thus developed for the multistatic radar detection of a rectangular plate reflector in the near-field region. This model is applied to an automotive scenario, in which a linear antenna array is spread out at the front of a vehicle, and performs a radar measurement of the distance to the back of the vehicle ahead. Based on the developed received signal model, the maximum likelihood estimator of the range is designed. By exploiting the near-field target model, this estimator is shown to provide a significant gain with respect to traditional range estimators. The impact of the system and scenario parameters, i.e. the carrier frequency, bandwidth and distance to the target, is furthermore evaluated. This analysis shows that the radar resolution in the near-field regime is improved at high carrier frequencies, while saturating to the traditional bandwidth-dependent resolution in the far-field region.
Novel Electromagnetism-Based Radar Propagation Model for 5G and Beyond
May 17, 2023



In order to evaluate the performance of radar and communication systems in future wireless networks, accurate propagation models are needed to predict efficiently the received powers at each node, and draw correct conclusions. In this paper, we present new radar propagation models based on the electromagnetism theory. The target is modelled as a flat or curved square plate to compute the scattered field and derive accurate radar cross section modellings. With a flat square plate, the model makes the link between the radar equation and the geometrical optics propagation model used in ray-tracing applications. It is then applied to popular automotive scenarios within the stochastic geometry framework to observe the impact of such modelling.
Joint Performance Metrics for Integrated Sensing and Communication Systems in Automotive Scenarios
Aug 29, 2022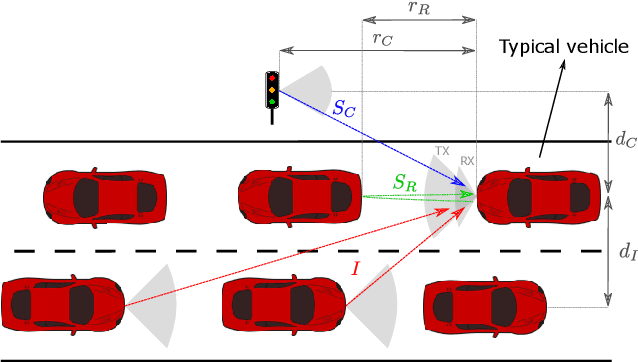
In this paper, multiple metrics are presented in order to jointly evaluate the performance of the radar and communication functions in scenarios involving Dual Function Radar Communication (DFRC) systems using stochastic geometry. These metrics are applied in an automotive scenario involving a two-lane road with vehicles and smart traffic lights, both equipped with DFRC systems. First, the performance achieved with these metrics are validated using Monte-Carlo (MC) simulations. Additionally, optimisation w.r.t. the power of the vehicles and smart traffic lights is performed based on the metrics. Then, the model is extended to include interference cancellation for the radar and/or communication function in all the metrics. Either full interference cancellation is applied, or a new model is proposed for imperfect interference cancellation.