 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFull-Duplex V2X Integrated Sensing and Communication Scenario: Stochastic geometry, Monte-Carlo, and Ray-Tracing Comparison
Paper and Code
Jul 09, 2024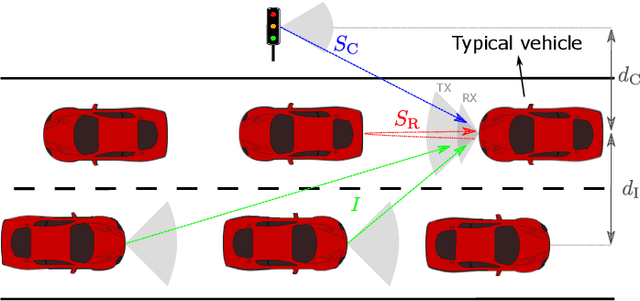
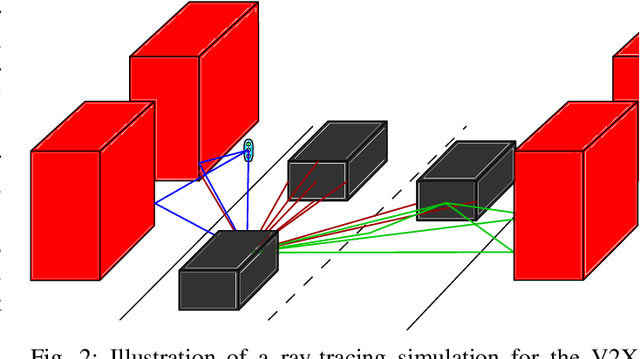
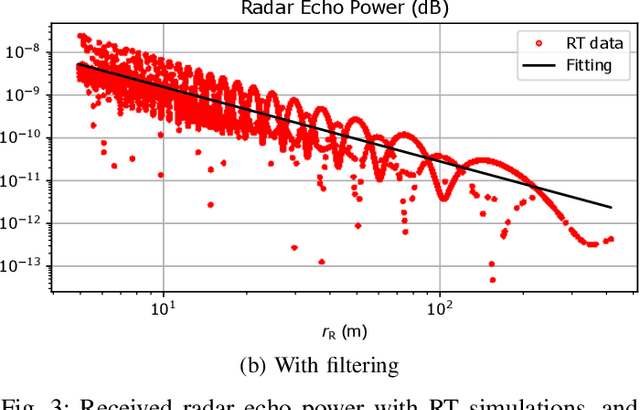
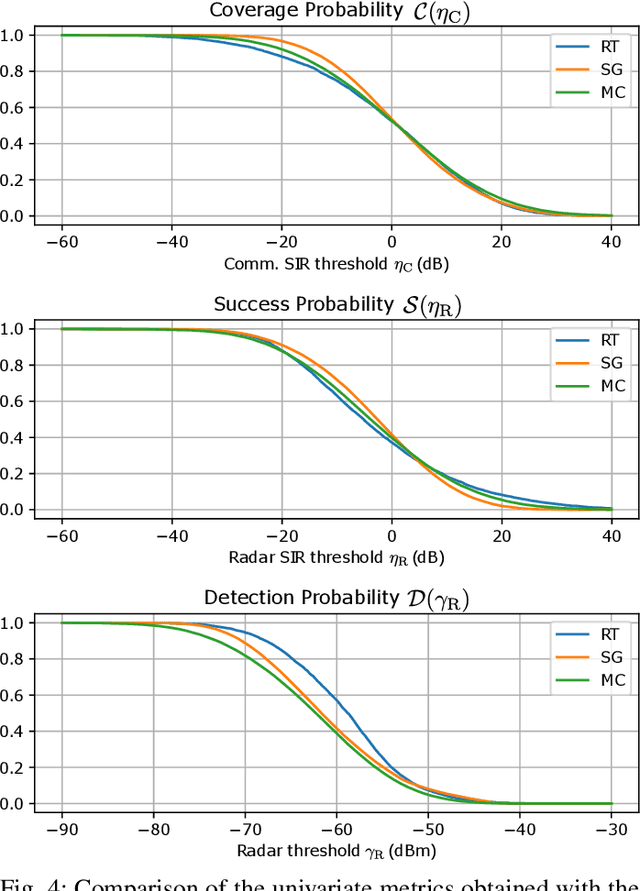
In this paper, performance of an Integrated Sensing and Communication (ISAC) Vehicle-to-Everything (V2X) scenario is evaluated, in which a vehicle simultaneously detects the next vehicle ahead while receiving a communication signal from a RoadSide Unit (RSU) of the infrastructure. Univariate and joint radar and communication performance metrics are evaluated within three different frameworks, namely the Stochastic Geometry (SG), Monte-Carlo (MC), and Ray-Tracing (RT) frameworks. The parameters of the system model are extracted from the RT simulations, and the metrics are compared to assess the accuracy of the SG framework. It is shown that the SG and MC system models are relevant w.r.t. RT simulations for the evaluation of univariate communication and sensing metrics, but larger discrepancies are observed for the joint metrics.