 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCOSY: Compositional 3DGS Synthesis for Disentangled Human Head Editing
May 22, 2026Recent 3D Gaussian Splatting (3DGS) GANs for human heads synthesize and render photorealistic 3D models in real-time and offer a vast variety in identity and appearance. However, controlling specific semantic attributes such as hair color or glasses remains challenging, as edits in the entangled latent space often induce unintended changes in identity or appearance. Although there are several methods that aim to disentangle the latent space post training by estimating directions that only modify certain features, these methods cannot guarantee complete disentanglement and often require pre-trained classifiers. In our approach, we propose a new generator architecture that synthesizes components, such as hair, skin, glasses, and torso, completely independently. This allows for changing the latent vector for one region while keeping the remaining parts fixed. Further, we achieve this separation using only sparse information such as the hair or skin color, eliminating the requirement of segmentation masks or geometric priors, often seen in prior work. To ensure matching shape and lighting conditions during editing, we allow minimal shared information via context tokens between the independent generators. These tokens even allow us to control the shape and light, without any prior annotation. Compared to existing works on GAN-based generation and editing, our method shows better disentanglement, more precise editing control, and competitive visual quality.
CGS-GAN: 3D Consistent Gaussian Splatting GANs for High Resolution Human Head Synthesis
May 23, 2025



Recently, 3D GANs based on 3D Gaussian splatting have been proposed for high quality synthesis of human heads. However, existing methods stabilize training and enhance rendering quality from steep viewpoints by conditioning the random latent vector on the current camera position. This compromises 3D consistency, as we observe significant identity changes when re-synthesizing the 3D head with each camera shift. Conversely, fixing the camera to a single viewpoint yields high-quality renderings for that perspective but results in poor performance for novel views. Removing view-conditioning typically destabilizes GAN training, often causing the training to collapse. In response to these challenges, we introduce CGS-GAN, a novel 3D Gaussian Splatting GAN framework that enables stable training and high-quality 3D-consistent synthesis of human heads without relying on view-conditioning. To ensure training stability, we introduce a multi-view regularization technique that enhances generator convergence with minimal computational overhead. Additionally, we adapt the conditional loss used in existing 3D Gaussian splatting GANs and propose a generator architecture designed to not only stabilize training but also facilitate efficient rendering and straightforward scaling, enabling output resolutions up to $2048^2$. To evaluate the capabilities of CGS-GAN, we curate a new dataset derived from FFHQ. This dataset enables very high resolutions, focuses on larger portions of the human head, reduces view-dependent artifacts for improved 3D consistency, and excludes images where subjects are obscured by hands or other objects. As a result, our approach achieves very high rendering quality, supported by competitive FID scores, while ensuring consistent 3D scene generation. Check our our project page here: https://fraunhoferhhi.github.io/cgs-gan/
Improving Adaptive Density Control for 3D Gaussian Splatting
Mar 18, 2025

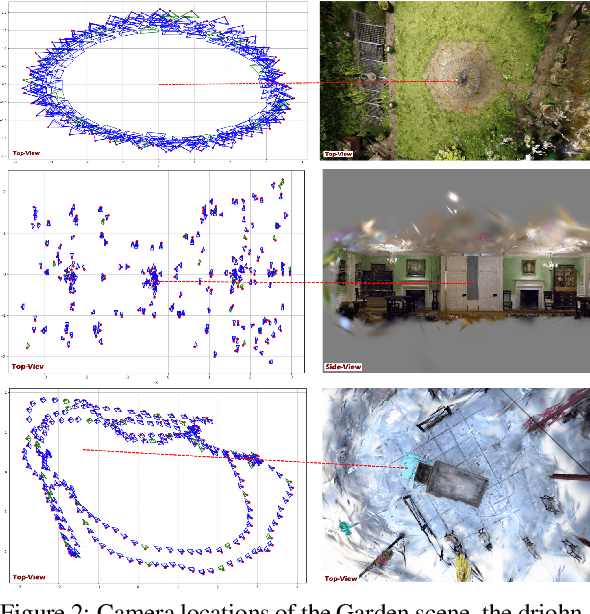

3D Gaussian Splatting (3DGS) has become one of the most influential works in the past year. Due to its efficient and high-quality novel view synthesis capabilities, it has been widely adopted in many research fields and applications. Nevertheless, 3DGS still faces challenges to properly manage the number of Gaussian primitives that are used during scene reconstruction. Following the adaptive density control (ADC) mechanism of 3D Gaussian Splatting, new Gaussians in under-reconstructed regions are created, while Gaussians that do not contribute to the rendering quality are pruned. We observe that those criteria for densifying and pruning Gaussians can sometimes lead to worse rendering by introducing artifacts. We especially observe under-reconstructed background or overfitted foreground regions. To encounter both problems, we propose three new improvements to the adaptive density control mechanism. Those include a correction for the scene extent calculation that does not only rely on camera positions, an exponentially ascending gradient threshold to improve training convergence, and significance-aware pruning strategy to avoid background artifacts. With these adaptions, we show that the rendering quality improves while using the same number of Gaussians primitives. Furthermore, with our improvements, the training converges considerably faster, allowing for more than twice as fast training times while yielding better quality than 3DGS. Finally, our contributions are easily compatible with most existing derivative works of 3DGS making them relevant for future works.
Permutation Learning with Only N Parameters: From SoftSort to Self-Organizing Gaussians
Mar 17, 2025Sorting and permutation learning are key concepts in optimization and machine learning, especially when organizing high-dimensional data into meaningful spatial layouts. The Gumbel-Sinkhorn method, while effective, requires N*N parameters to determine a full permutation matrix, making it computationally expensive for large datasets. Low-rank matrix factorization approximations reduce memory requirements to 2MN (with M << N), but they still struggle with very large problems. SoftSort, by providing a continuous relaxation of the argsort operator, allows differentiable 1D sorting, but it faces challenges with multidimensional data and complex permutations. In this paper, we present a novel method for learning permutations using only N parameters, which dramatically reduces storage costs. Our approach builds on SoftSort, but extends it by iteratively shuffling the N indices of the elements to be sorted through a separable learning process. This modification significantly improves sorting quality, especially for multidimensional data and complex optimization criteria, and outperforms pure SoftSort. Our method offers improved memory efficiency and scalability compared to existing approaches, while maintaining high-quality permutation learning. Its dramatically reduced memory requirements make it particularly well-suited for large-scale optimization tasks, such as "Self-Organizing Gaussians", where efficient and scalable permutation learning is critical.
Gaussian Splatting Decoder for 3D-aware Generative Adversarial Networks
Apr 16, 2024
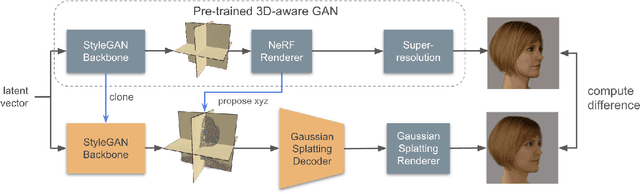
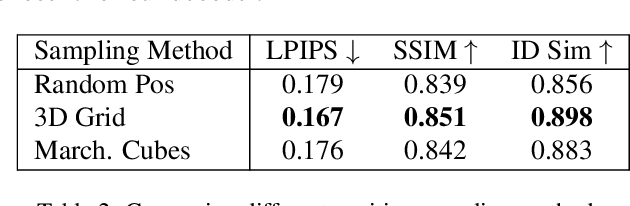
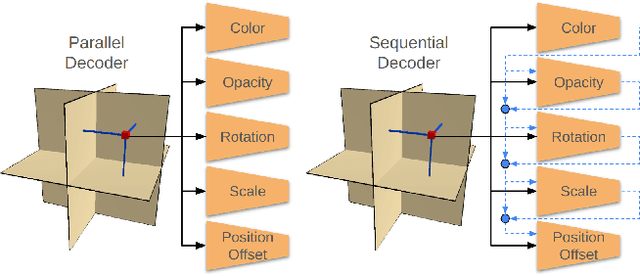
NeRF-based 3D-aware Generative Adversarial Networks (GANs) like EG3D or GIRAFFE have shown very high rendering quality under large representational variety. However, rendering with Neural Radiance Fields poses challenges for 3D applications: First, the significant computational demands of NeRF rendering preclude its use on low-power devices, such as mobiles and VR/AR headsets. Second, implicit representations based on neural networks are difficult to incorporate into explicit 3D scenes, such as VR environments or video games. 3D Gaussian Splatting (3DGS) overcomes these limitations by providing an explicit 3D representation that can be rendered efficiently at high frame rates. In this work, we present a novel approach that combines the high rendering quality of NeRF-based 3D-aware GANs with the flexibility and computational advantages of 3DGS. By training a decoder that maps implicit NeRF representations to explicit 3D Gaussian Splatting attributes, we can integrate the representational diversity and quality of 3D GANs into the ecosystem of 3D Gaussian Splatting for the first time. Additionally, our approach allows for a high resolution GAN inversion and real-time GAN editing with 3D Gaussian Splatting scenes.
Compact 3D Scene Representation via Self-Organizing Gaussian Grids
Dec 19, 20233D Gaussian Splatting has recently emerged as a highly promising technique for modeling of static 3D scenes. In contrast to Neural Radiance Fields, it utilizes efficient rasterization allowing for very fast rendering at high-quality. However, the storage size is significantly higher, which hinders practical deployment, e.g.~on resource constrained devices. In this paper, we introduce a compact scene representation organizing the parameters of 3D Gaussian Splatting (3DGS) into a 2D grid with local homogeneity, ensuring a drastic reduction in storage requirements without compromising visual quality during rendering. Central to our idea is the explicit exploitation of perceptual redundancies present in natural scenes. In essence, the inherent nature of a scene allows for numerous permutations of Gaussian parameters to equivalently represent it. To this end, we propose a novel highly parallel algorithm that regularly arranges the high-dimensional Gaussian parameters into a 2D grid while preserving their neighborhood structure. During training, we further enforce local smoothness between the sorted parameters in the grid. The uncompressed Gaussians use the same structure as 3DGS, ensuring a seamless integration with established renderers. Our method achieves a reduction factor of 8x to 26x in size for complex scenes with no increase in training time, marking a substantial leap forward in the domain of 3D scene distribution and consumption. Additional information can be found on our project page: https://fraunhoferhhi.github.io/Self-Organizing-Gaussians/
Multi-view Inversion for 3D-aware Generative Adversarial Networks
Dec 08, 2023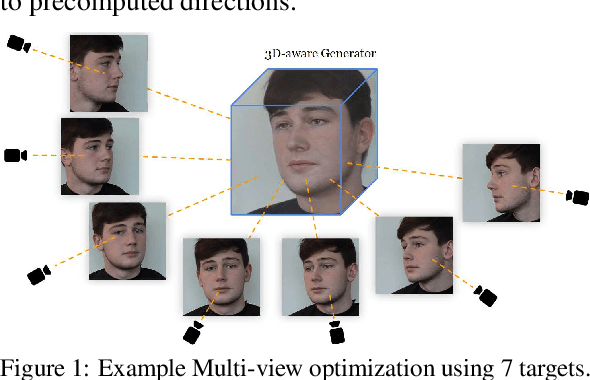
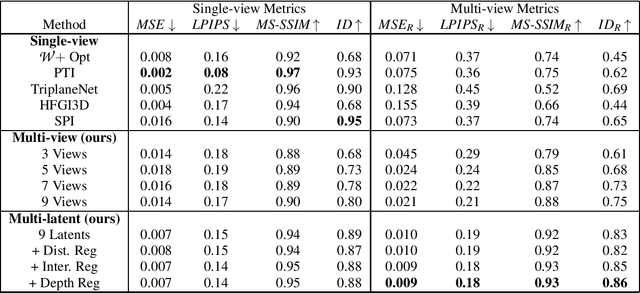
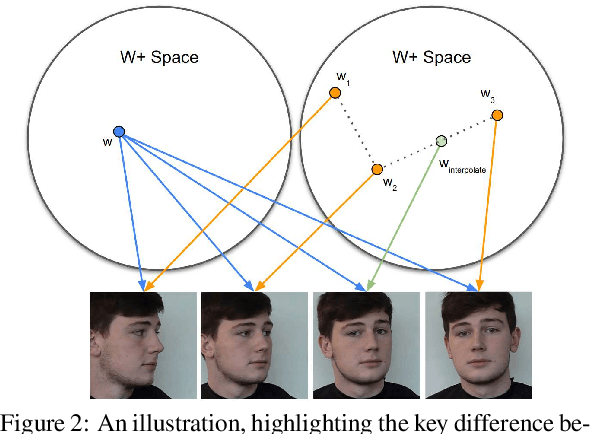
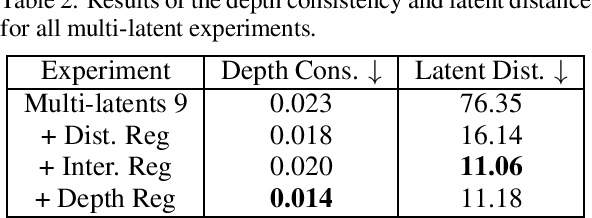
Current 3D GAN inversion methods for human heads typically use only one single frontal image to reconstruct the whole 3D head model. This leaves out meaningful information when multi-view data or dynamic videos are available. Our method builds on existing state-of-the-art 3D GAN inversion techniques to allow for consistent and simultaneous inversion of multiple views of the same subject. We employ a multi-latent extension to handle inconsistencies present in dynamic face videos to re-synthesize consistent 3D representations from the sequence. As our method uses additional information about the target subject, we observe significant enhancements in both geometric accuracy and image quality, particularly when rendering from wide viewing angles. Moreover, we demonstrate the editability of our inverted 3D renderings, which distinguishes them from NeRF-based scene reconstructions.
Haystack: A Panoptic Scene Graph Dataset to Evaluate Rare Predicate Classes
Sep 05, 2023Current scene graph datasets suffer from strong long-tail distributions of their predicate classes. Due to a very low number of some predicate classes in the test sets, no reliable metrics can be retrieved for the rarest classes. We construct a new panoptic scene graph dataset and a set of metrics that are designed as a benchmark for the predictive performance especially on rare predicate classes. To construct the new dataset, we propose a model-assisted annotation pipeline that efficiently finds rare predicate classes that are hidden in a large set of images like needles in a haystack. Contrary to prior scene graph datasets, Haystack contains explicit negative annotations, i.e. annotations that a given relation does not have a certain predicate class. Negative annotations are helpful especially in the field of scene graph generation and open up a whole new set of possibilities to improve current scene graph generation models. Haystack is 100% compatible with existing panoptic scene graph datasets and can easily be integrated with existing evaluation pipelines. Our dataset and code can be found here: https://lorjul.github.io/haystack/. It includes annotation files and simple to use scripts and utilities, to help with integrating our dataset in existing work.