 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTilt-X: Enabling Compliant Aerial Manipulation through a Tiltable-Extensible Continuum Manipulator
Feb 27, 2026Aerial manipulators extend the reach and manipulation capabilities of uncrewed multirotor aerial vehicles for inspection, agriculture, sampling, and delivery. Continuum arm aerial manipulation systems offer lightweight, dexterous, and compliant interaction opportunities. Existing designs allow manipulation only below the UAV which restricts their deployability in multiple directions and through clutter. They are also sensitive to propeller downwash. Addressing these limitations, we present Tilt-X, a continuum arm aerial manipulator that integrates a tilting mechanism, a telescopic stage, and a cable-driven continuum section. We present its design and kinematic model and validate it through flight demonstrations. Tilt-X enables a volumetric workspace with up to 75 mm extension and planar orientations between 0$^\circ$ to 90$^\circ$. Experiments comparing end effector pose with and without downwash quantitatively measure its accuracy, providing critical evidence to guide the design and control of reliable aerial manipulators. Results show stabilisation of end effector pose as the manipulator extends out of the propeller influence zone.
Schmidt or Compressed filtering for Visual-Inertial SLAM?
Sep 29, 2021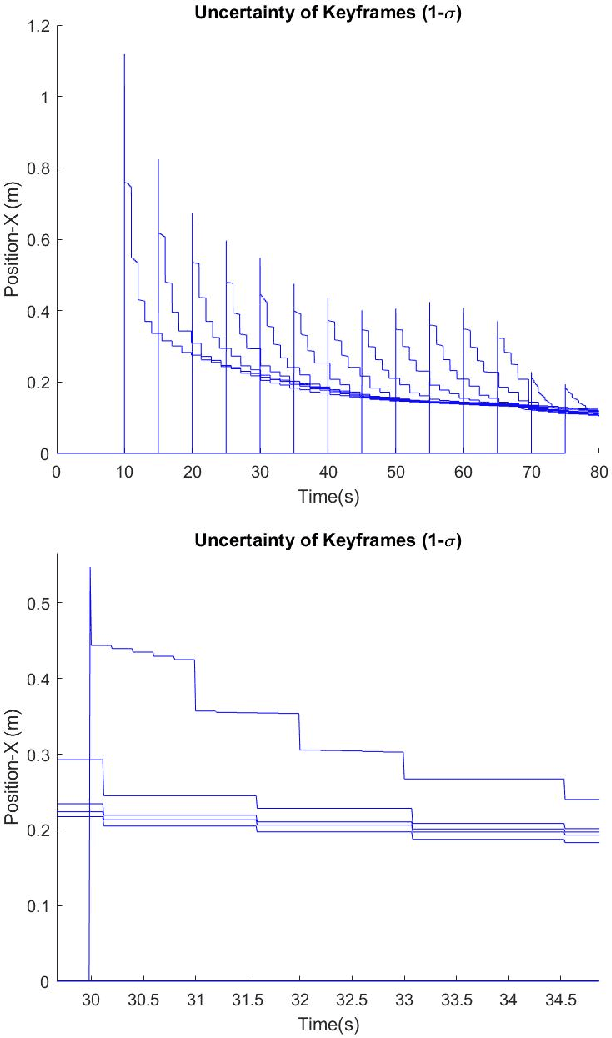
Visual-inertial SLAM has been studied widely due to the advantage of its lightweight, cost-effectiveness, and rich information compared to other sensors. A multi-state constrained filter (MSCKF) and its Schmidt version have been developed to address the computational cost, which treats keyframes as static nuisance parameters, leading to sub-optimal performance. We propose a new Compressed-MSCKF which can achieve improved accuracy with moderate computational costs. By keeping the information gain with compressed form, it can limit to $\mathcal{O}(L)$ with $L$ being the number of local keyframes. The performance of the proposed system has been evaluated using a MATLAB simulator.
A Multi-UAV System for Exploration and Target Finding in Cluttered and GPS-Denied Environments
Jul 19, 2021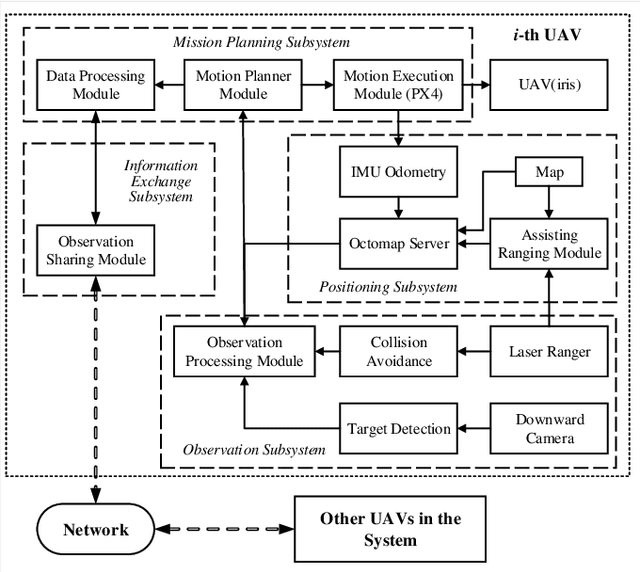
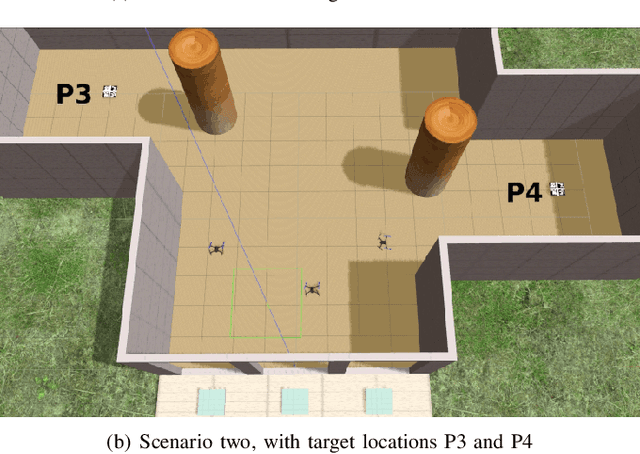
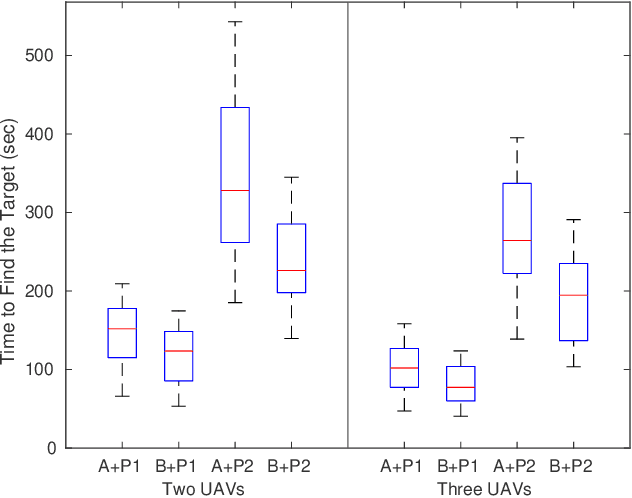
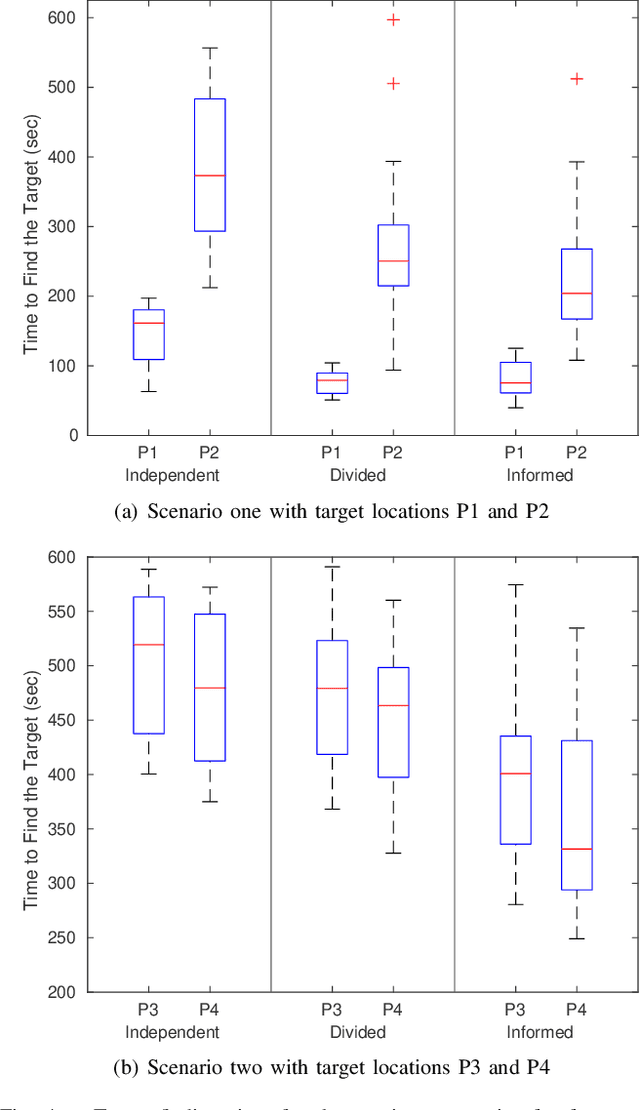
The use of multi-rotor Unmanned Aerial Vehicles (UAVs) for search and rescue as well as remote sensing is rapidly increasing. Multi-rotor UAVs, however, have limited endurance. The range of UAV applications can be widened if teams of multiple UAVs are used. We propose a framework for a team of UAVs to cooperatively explore and find a target in complex GPS-denied environments with obstacles. The team of UAVs autonomously navigates, explores, detects, and finds the target in a cluttered environment with a known map. Examples of such environments include indoor scenarios, urban or natural canyons, caves, and tunnels, where the GPS signal is limited or blocked. The framework is based on a probabilistic decentralised Partially Observable Markov Decision Process which accounts for the uncertainties in sensing and the environment. The team can cooperate efficiently, with each UAV sharing only limited processed observations and their locations during the mission. The system is simulated using the Robotic Operating System and Gazebo. Performance of the system with an increasing number of UAVs in several indoor scenarios with obstacles is tested. Results indicate that the proposed multi-UAV system has improvements in terms of time-cost, the proportion of search area surveyed, as well as successful rates for search and rescue missions.