Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSchmidt or Compressed filtering for Visual-Inertial SLAM?
Paper and Code
Sep 29, 2021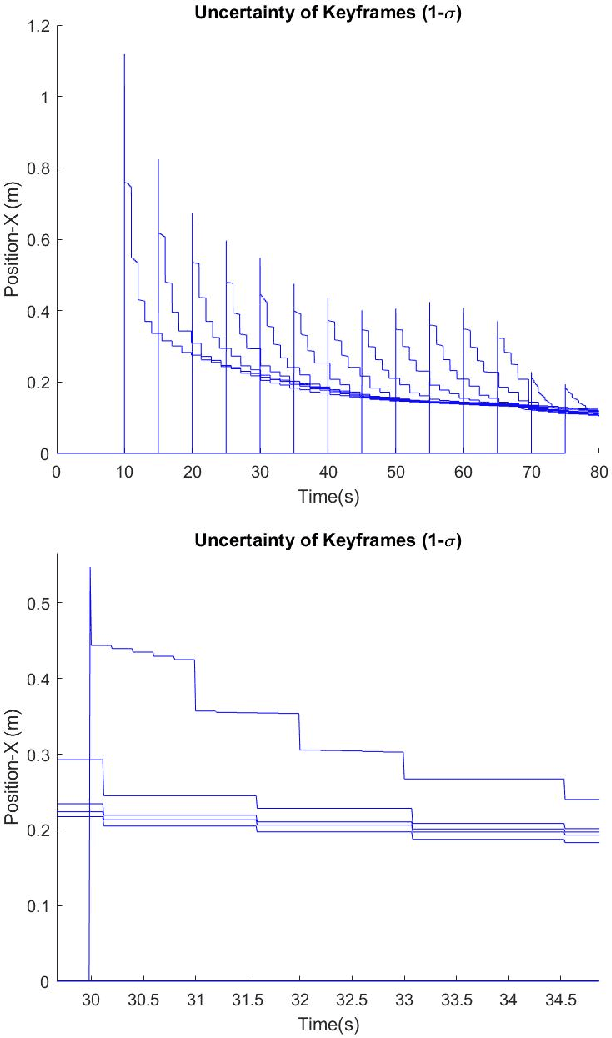
Visual-inertial SLAM has been studied widely due to the advantage of its lightweight, cost-effectiveness, and rich information compared to other sensors. A multi-state constrained filter (MSCKF) and its Schmidt version have been developed to address the computational cost, which treats keyframes as static nuisance parameters, leading to sub-optimal performance. We propose a new Compressed-MSCKF which can achieve improved accuracy with moderate computational costs. By keeping the information gain with compressed form, it can limit to $\mathcal{O}(L)$ with $L$ being the number of local keyframes. The performance of the proposed system has been evaluated using a MATLAB simulator.
View paper on