 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSchmidt or Compressed filtering for Visual-Inertial SLAM?
Sep 29, 2021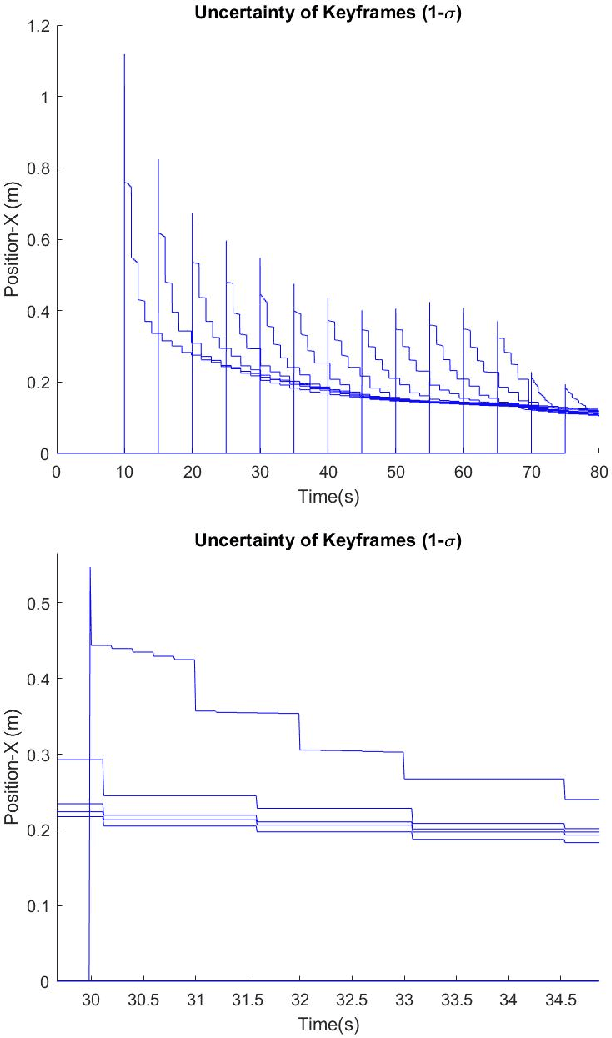
Visual-inertial SLAM has been studied widely due to the advantage of its lightweight, cost-effectiveness, and rich information compared to other sensors. A multi-state constrained filter (MSCKF) and its Schmidt version have been developed to address the computational cost, which treats keyframes as static nuisance parameters, leading to sub-optimal performance. We propose a new Compressed-MSCKF which can achieve improved accuracy with moderate computational costs. By keeping the information gain with compressed form, it can limit to $\mathcal{O}(L)$ with $L$ being the number of local keyframes. The performance of the proposed system has been evaluated using a MATLAB simulator.
Iterative Smoothing and Outlier Detection for Underwater Navigation
Sep 29, 2021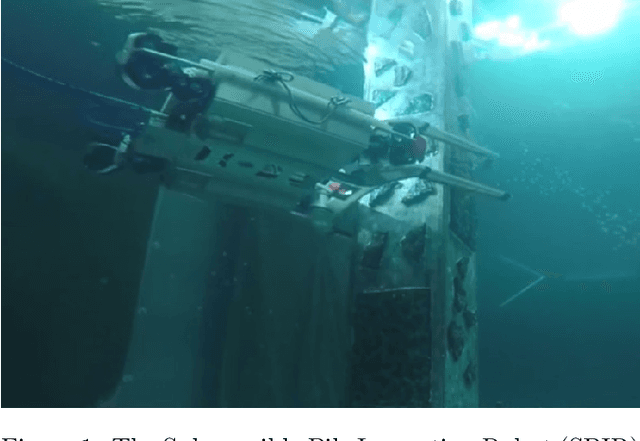
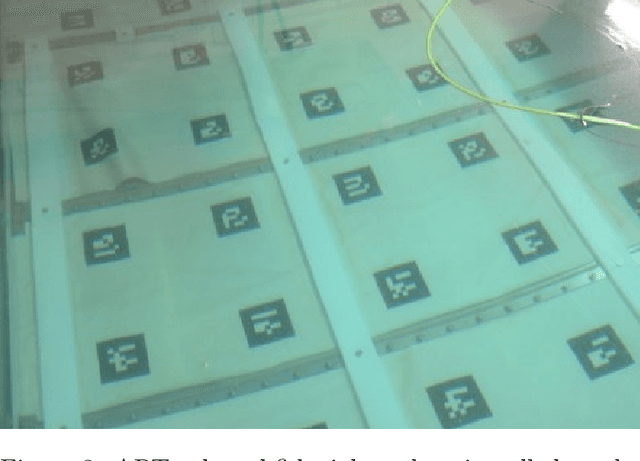
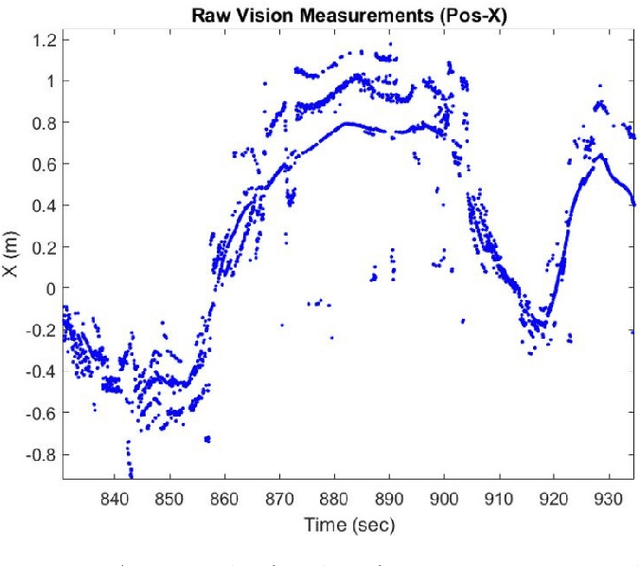

Underwater visual-inertial navigation is challenging due to the poor visibility and presence of outliers in underwater environments. The navigation performance is closely related to outlier detection and elimination. Existing methods assume the inertial odometry is accurate enough for outlier detection, which is not valid for low-cost inertial applications. We propose a novel iterative smoothing and outlier detection method aiming for underwater navigation. Using the dataset collected from an underwater robot and fiducial markers, experimental results confirm that the method can successfully eliminate the outliers and enhance navigation accuracy.
Towards a Pantograph-based Interventional AUV for Under-ice Measurement
Sep 29, 2021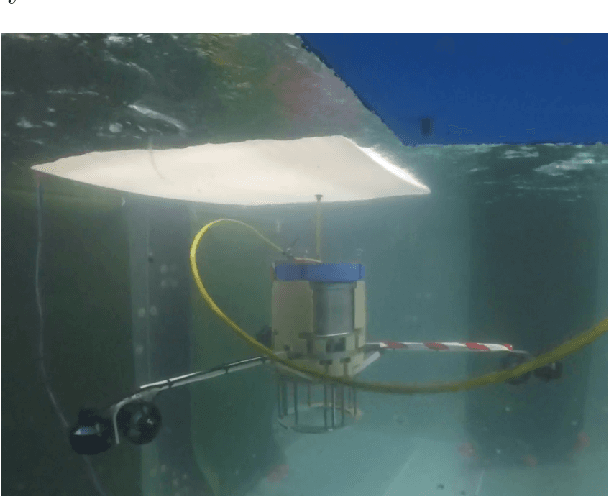
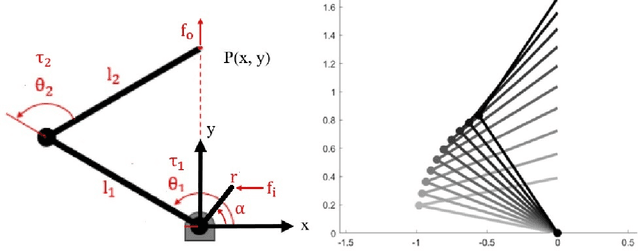
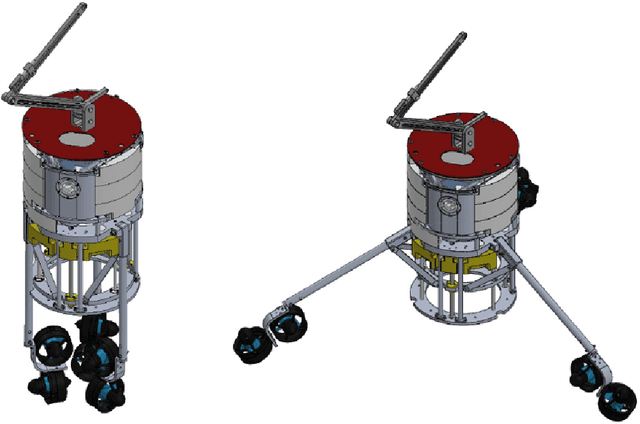

This paper addresses the design of a novel interventional robotic platform, aiming to perform an autonomous sampling and measurement under the thin ice in the Antarctic environment. We propose a pantograph mechanism, which can effectively generate a constant interaction force to the surface during the contact, which is crucial for reliable measurements. We provide the proof-of-concept design of the pantograph with a robotic prototype with foldable actuation, and preliminary results of the pantograph mechanism and the localisation system are provided, confirming the feasibility of the system.