Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Pantograph-based Interventional AUV for Under-ice Measurement
Paper and Code
Sep 29, 2021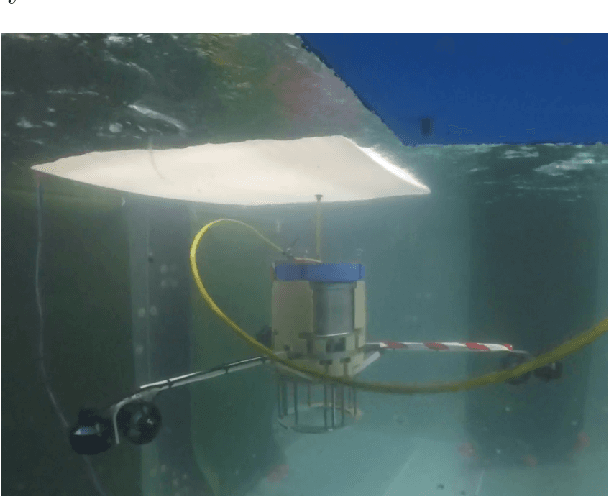
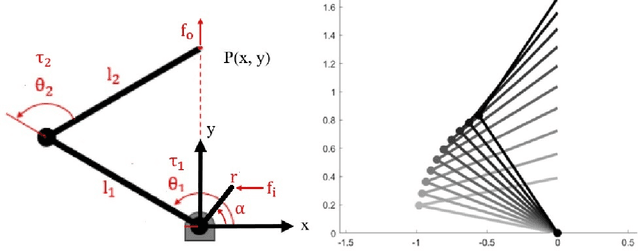
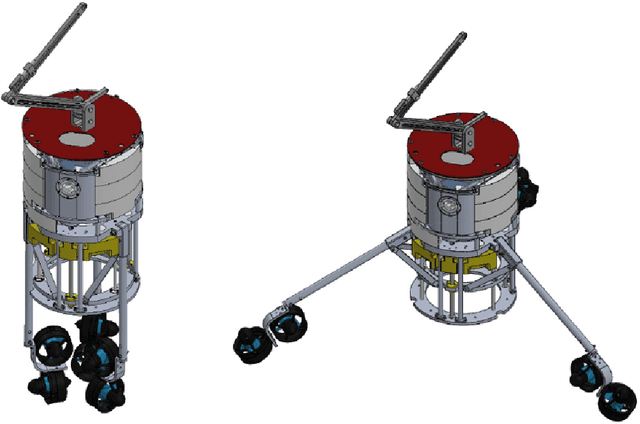

This paper addresses the design of a novel interventional robotic platform, aiming to perform an autonomous sampling and measurement under the thin ice in the Antarctic environment. We propose a pantograph mechanism, which can effectively generate a constant interaction force to the surface during the contact, which is crucial for reliable measurements. We provide the proof-of-concept design of the pantograph with a robotic prototype with foldable actuation, and preliminary results of the pantograph mechanism and the localisation system are provided, confirming the feasibility of the system.
View paper on