 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCodeMerge: Codebook-Guided Model Merging for Robust Test-Time Adaptation in Autonomous Driving
May 22, 2025



Maintaining robust 3D perception under dynamic and unpredictable test-time conditions remains a critical challenge for autonomous driving systems. Existing test-time adaptation (TTA) methods often fail in high-variance tasks like 3D object detection due to unstable optimization and sharp minima. While recent model merging strategies based on linear mode connectivity (LMC) offer improved stability by interpolating between fine-tuned checkpoints, they are computationally expensive, requiring repeated checkpoint access and multiple forward passes. In this paper, we introduce CodeMerge, a lightweight and scalable model merging framework that bypasses these limitations by operating in a compact latent space. Instead of loading full models, CodeMerge represents each checkpoint with a low-dimensional fingerprint derived from the source model's penultimate features and constructs a key-value codebook. We compute merging coefficients using ridge leverage scores on these fingerprints, enabling efficient model composition without compromising adaptation quality. Our method achieves strong performance across challenging benchmarks, improving end-to-end 3D detection 14.9% NDS on nuScenes-C and LiDAR-based detection by over 7.6% mAP on nuScenes-to-KITTI, while benefiting downstream tasks such as online mapping, motion prediction and planning even without training. Code and pretrained models are released in the supplementary material.
TT-GaussOcc: Test-Time Compute for Self-Supervised Occupancy Prediction via Spatio-Temporal Gaussian Splatting
Mar 11, 2025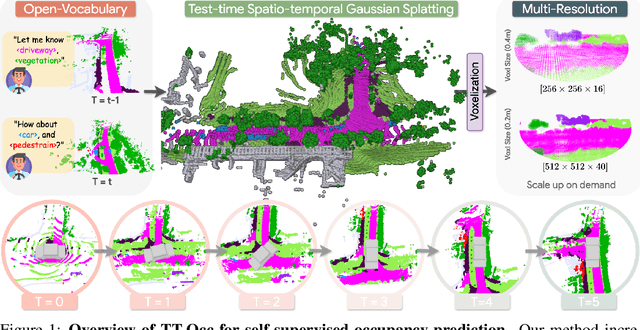

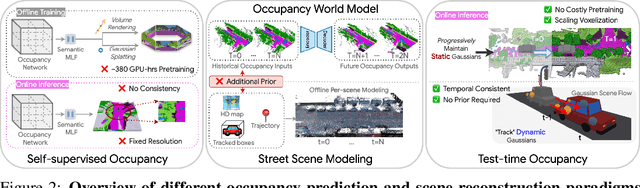
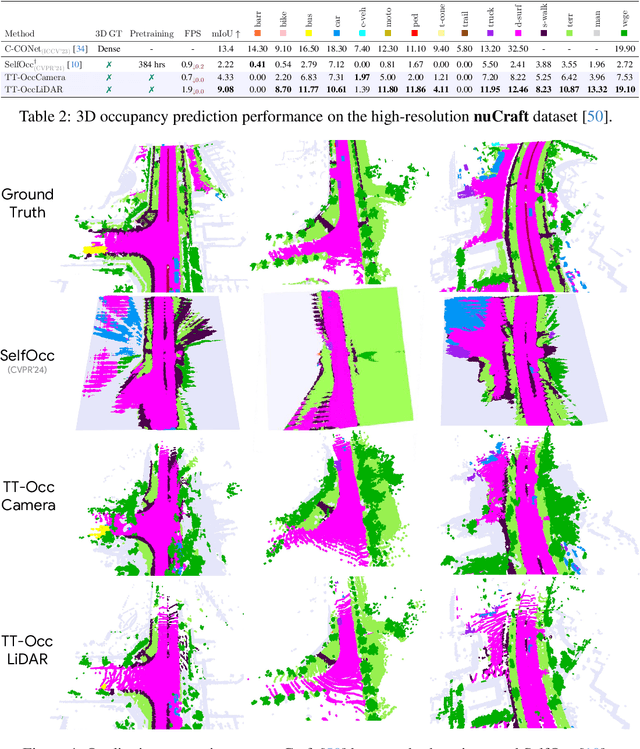
Self-supervised 3D occupancy prediction offers a promising solution for understanding complex driving scenes without requiring costly 3D annotations. However, training dense voxel decoders to capture fine-grained geometry and semantics can demand hundreds of GPU hours, and such models often fail to adapt to varying voxel resolutions or new classes without extensive retraining. To overcome these limitations, we propose a practical and flexible test-time occupancy prediction framework termed TT-GaussOcc. Our approach incrementally optimizes time-aware 3D Gaussians instantiated from raw sensor streams at runtime, enabling voxelization at arbitrary user-specified resolution. Specifically, TT-GaussOcc operates in a "lift-move-voxel" symphony: we first "lift" surrounding-view semantics obtained from 2D vision foundation models (VLMs) to instantiate Gaussians at non-empty 3D space; Next, we "move" dynamic Gaussians from previous frames along estimated Gaussian scene flow to complete appearance and eliminate trailing artifacts of fast-moving objects, while accumulating static Gaussians to enforce temporal consistency; Finally, we mitigate inherent noises in semantic predictions and scene flow vectors by periodically smoothing neighboring Gaussians during optimization, using proposed trilateral RBF kernels that jointly consider color, semantic, and spatial affinities. The historical static and current dynamic Gaussians are then combined and voxelized to generate occupancy prediction. Extensive experiments on Occ3D and nuCraft with varying voxel resolutions demonstrate that TT-GaussOcc surpasses self-supervised baselines by 46% on mIoU without any offline training, and supports finer voxel resolutions at 2.6 FPS inference speed.
Gaussian-Forest: Hierarchical-Hybrid 3D Gaussian Splatting for Compressed Scene Modeling
Jun 13, 2024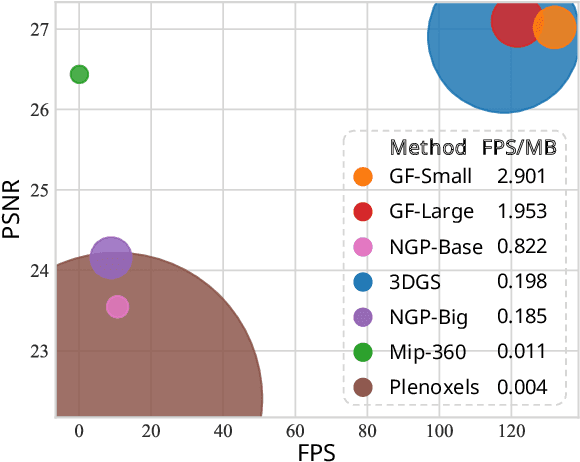
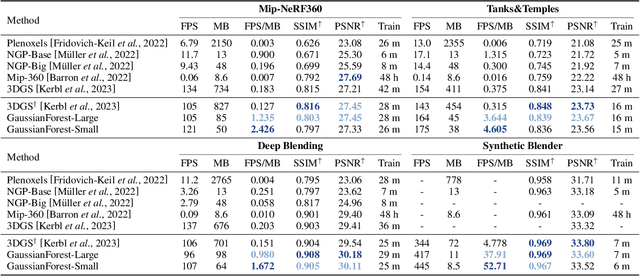


The field of novel-view synthesis has recently witnessed the emergence of 3D Gaussian Splatting, which represents scenes in a point-based manner and renders through rasterization. This methodology, in contrast to Radiance Fields that rely on ray tracing, demonstrates superior rendering quality and speed. However, the explicit and unstructured nature of 3D Gaussians poses a significant storage challenge, impeding its broader application. To address this challenge, we introduce the Gaussian-Forest modeling framework, which hierarchically represents a scene as a forest of hybrid 3D Gaussians. Each hybrid Gaussian retains its unique explicit attributes while sharing implicit ones with its sibling Gaussians, thus optimizing parameterization with significantly fewer variables. Moreover, adaptive growth and pruning strategies are designed, ensuring detailed representation in complex regions and a notable reduction in the number of required Gaussians. Extensive experiments demonstrate that Gaussian-Forest not only maintains comparable speed and quality but also achieves a compression rate surpassing 10 times, marking a significant advancement in efficient scene modeling. Codes are available at https://github.com/Xian-Bei/GaussianForest.