 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGated Domain Units for Multi-source Domain Generalization
Jun 24, 2022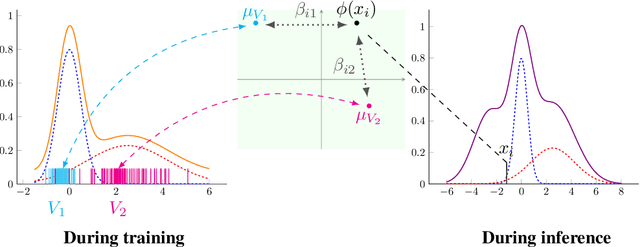
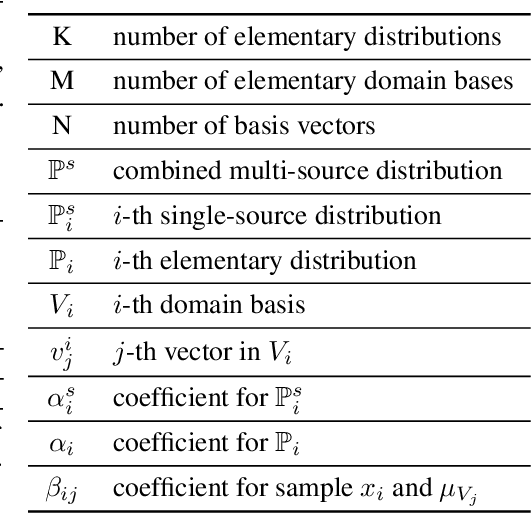
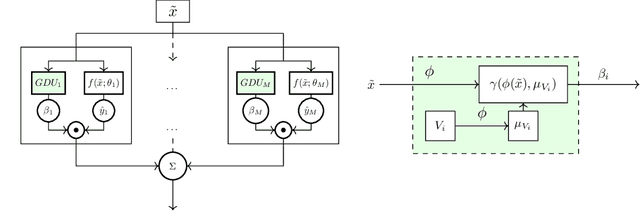
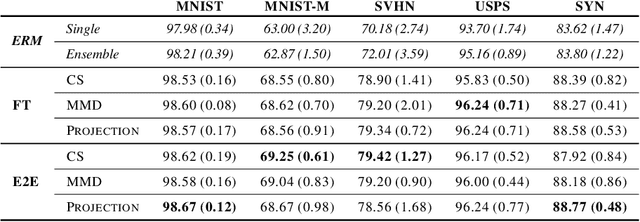
Distribution shift (DS) is a common problem that deteriorates the performance of learning machines. To overcome this problem, we postulate that real-world distributions are composed of elementary distributions that remain invariant across different domains. We call this an invariant elementary distribution (I.E.D.) assumption. This invariance thus enables knowledge transfer to unseen domains. To exploit this assumption in domain generalization (DG), we developed a modular neural network layer that consists of Gated Domain Units (GDUs). Each GDU learns an embedding of an individual elementary domain that allows us to encode the domain similarities during the training. During inference, the GDUs compute similarities between an observation and each of the corresponding elementary distributions which are then used to form a weighted ensemble of learning machines. Because our layer is trained with backpropagation, it can be easily integrated into existing deep learning frameworks. Our evaluation on Digits5, ECG, Camelyon17, iWildCam, and FMoW shows a significant improvement in the performance on out-of-training target domains without any access to data from the target domains. This finding supports the validity of the I.E.D. assumption in real-world data distributions.
Driver Identification via the Steering Wheel
Sep 09, 2019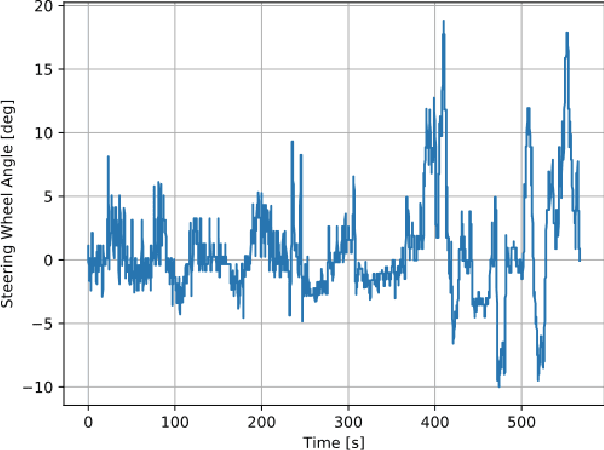
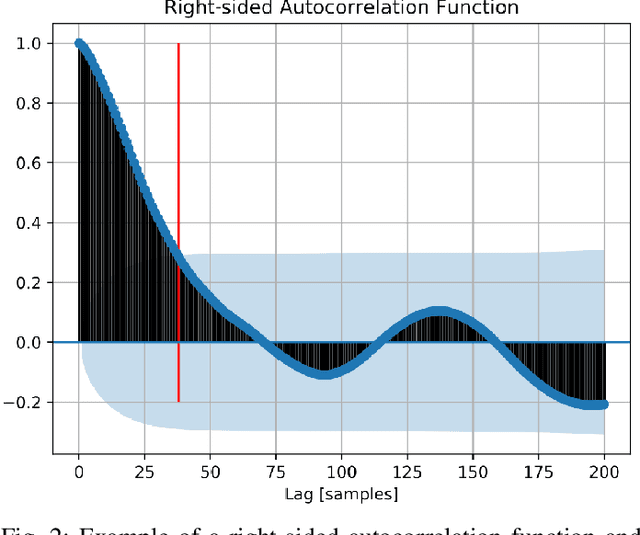
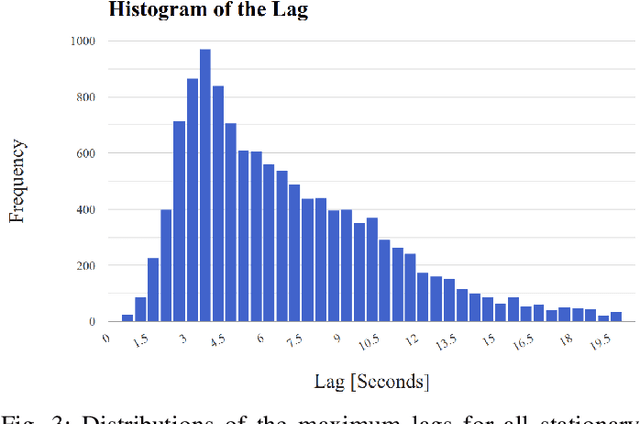

Driver identification has emerged as a vital research field, where both practitioners and researchers investigate the potential of driver identification to enable a personalized driving experience. Within recent years, a selection of studies have reported that individuals could be perfectly identified based on their driving behavior under controlled conditions. However, research investigating the potential of driver identification under naturalistic conditions claim accuracies only marginally higher than random guess. The paper at hand provides a comprehensive summary of the recent work, highlighting the main discrepancies in the design of the machine learning approaches, primarily the window length parameter that was considered. Key findings further indicate that the longitudinal vehicle control information is particularly useful for driver identification, leaving the research gap on the extent to which the lateral vehicle control can be used for reliable identification. Building upon existing work, we provide a novel approach for the design of the window length parameter that provides evidence that reliable driver identification can be achieved with data limited to the steering wheel only. The results and insights in this paper are based on data collected from the largest naturalistic driving study conducted in this field. Overall, a neural network based on GRUs was found to provide better identification performance than traditional methods, increasing the prediction accuracy from under 15\% to over 65\% for 15 drivers. When leveraging the full field study dataset, comprising 72 drivers, the accuracy of identification prediction of the approach improved a random guess approach by a factor of 25.
Improving Heart Rate Variability Measurements from Consumer Smartwatches with Machine Learning
Jul 17, 2019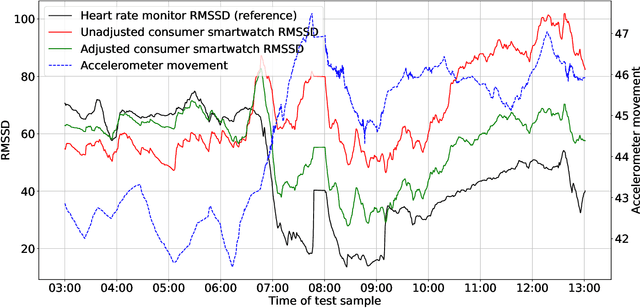
The reactions of the human body to physical exercise, psychophysiological stress and heart diseases are reflected in heart rate variability (HRV). Thus, continuous monitoring of HRV can contribute to determining and predicting issues in well-being and mental health. HRV can be measured in everyday life by consumer wearable devices such as smartwatches which are easily accessible and affordable. However, they are arguably accurate due to the stability of the sensor. We hypothesize a systematic error which is related to the wearer movement. Our evidence builds upon explanatory and predictive modeling: we find a statistically significant correlation between error in HRV measurements and the wearer movement. We show that this error can be minimized by bringing into context additional available sensor information, such as accelerometer data. This work demonstrates our research-in-progress on how neural learning can minimize the error of such smartwatch HRV measurements.