 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph-based Task-specific Prediction Models for Interactions between Deformable and Rigid Objects
Mar 04, 2021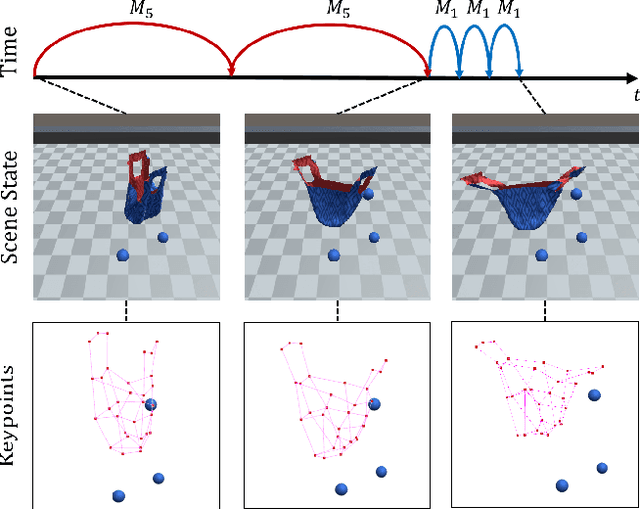
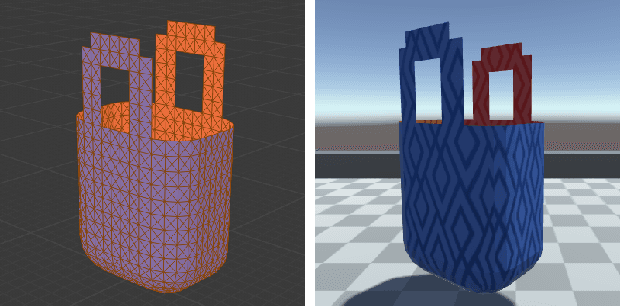
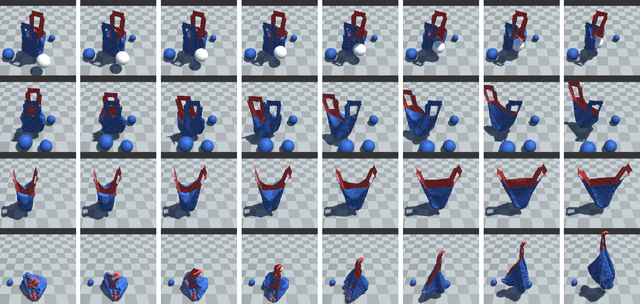
Capturing scene dynamics and predicting the future scene state is challenging but essential for robotic manipulation tasks, especially when the scene contains both rigid and deformable objects. In this work, we contribute a simulation environment and generate a novel dataset for task-specific manipulation, involving interactions between rigid objects and a deformable bag. The dataset incorporates a rich variety of scenarios including different object sizes, object numbers and manipulation actions. We approach dynamics learning by proposing an object-centric graph representation and two modules which are Active Prediction Module (APM) and Position Prediction Module (PPM) based on graph neural networks with an encode-process-decode architecture. At the inference stage, we build a two-stage model based on the learned modules for single time step prediction. We combine modules with different prediction horizons into a mixed-horizon model which addresses long-term prediction. In an ablation study, we show the benefits of the two-stage model for single time step prediction and the effectiveness of the mixed-horizon model for long-term prediction tasks. Supplementary material is available at https://github.com/wengzehang/deformable_rigid_interaction_prediction