 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring Levels of Control for a Navigation Assistant for Blind Travelers
Jan 05, 2023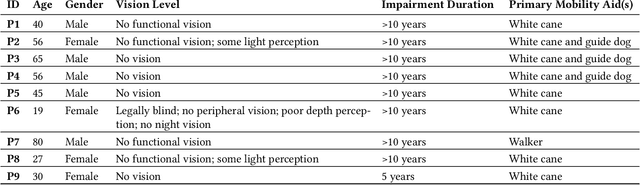
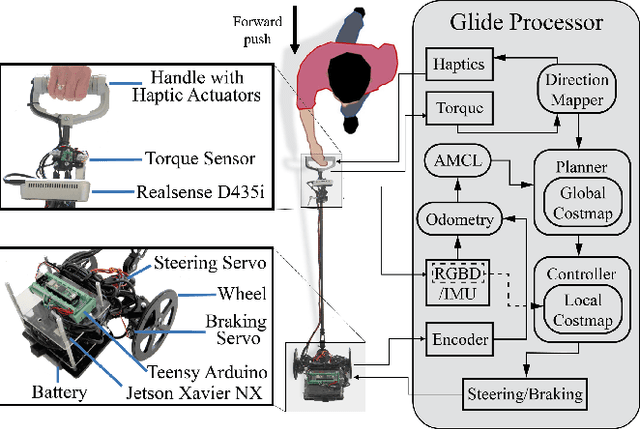
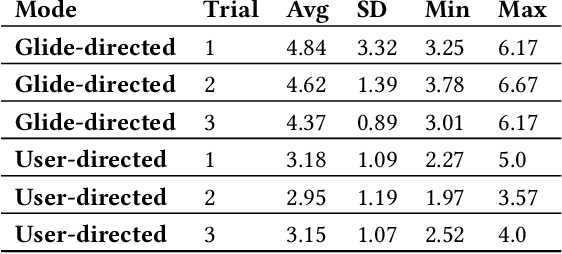

Only a small percentage of blind and low-vision people use traditional mobility aids such as a cane or a guide dog. Various assistive technologies have been proposed to address the limitations of traditional mobility aids. These devices often give either the user or the device majority of the control. In this work, we explore how varying levels of control affect the users' sense of agency, trust in the device, confidence, and successful navigation. We present Glide, a novel mobility aid with two modes for control: Glide-directed and User-directed. We employ Glide in a study (N=9) in which blind or low-vision participants used both modes to navigate through an indoor environment. Overall, participants found that Glide was easy to use and learn. Most participants trusted Glide despite its current limitations, and their confidence and performance increased as they continued to use Glide. Users' control mode preference varied in different situations; no single mode "won" in all situations.
Validation of Vector Data using Oblique Images
Jun 17, 2022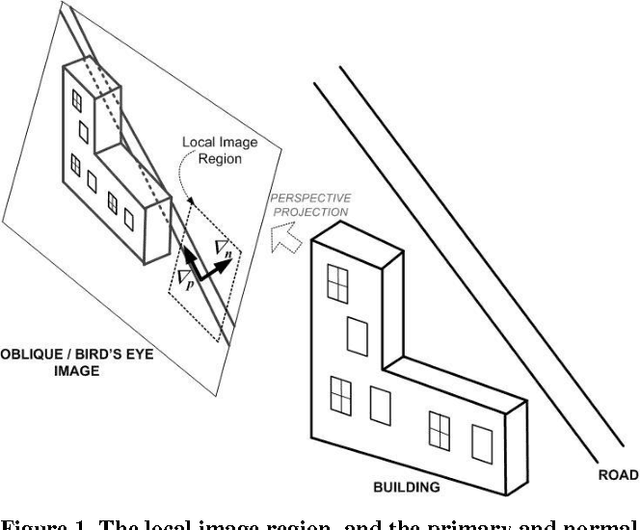
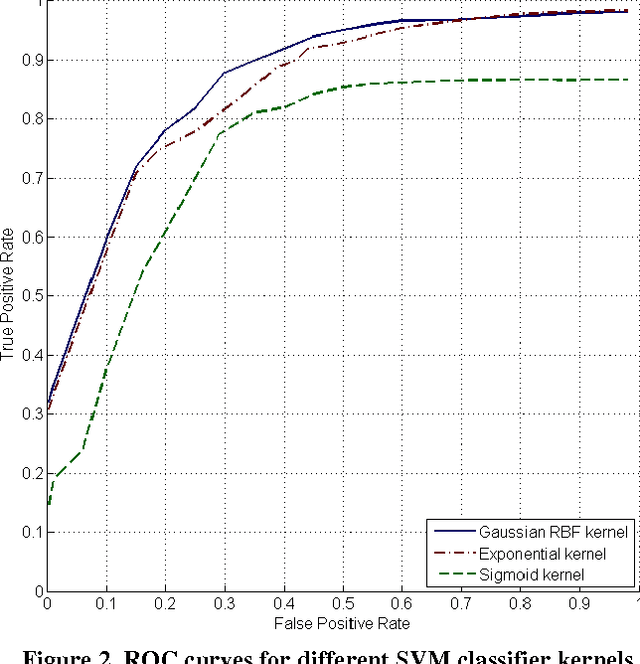
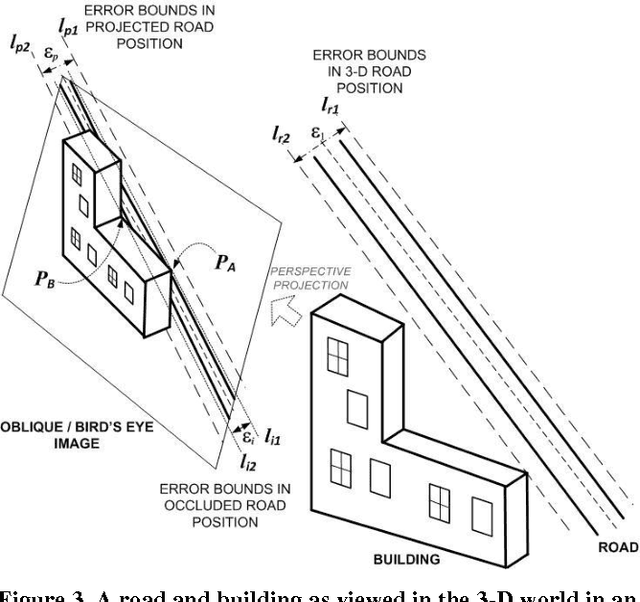
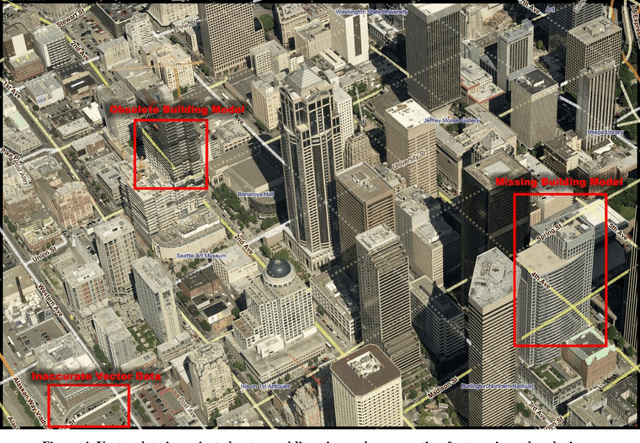
Oblique images are aerial photographs taken at oblique angles to the earth's surface. Projections of vector and other geospatial data in these images depend on camera parameters, positions of the geospatial entities, surface terrain, occlusions, and visibility. This paper presents a robust and scalable algorithm to detect inconsistencies in vector data using oblique images. The algorithm uses image descriptors to encode the local appearance of a geospatial entity in images. These image descriptors combine color, pixel-intensity gradients, texture, and steerable filter responses. A Support Vector Machine classifier is trained to detect image descriptors that are not consistent with underlying vector data, digital elevation maps, building models, and camera parameters. In this paper, we train the classifier on visible road segments and non-road data. Thereafter, the trained classifier detects inconsistencies in vectors, which include both occluded and misaligned road segments. The consistent road segments validate our vector, DEM, and 3-D model data for those areas while inconsistent segments point out errors. We further show that a search for descriptors that are consistent with visible road segments in the neighborhood of a misaligned road yields the desired road alignment that is consistent with pixels in the image.
* In Proceedings of 16th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems (ACM GIS'08)
HapticBots: Distributed Encountered-type Haptics for VR with Multiple Shape-changing Mobile Robots
Aug 24, 2021

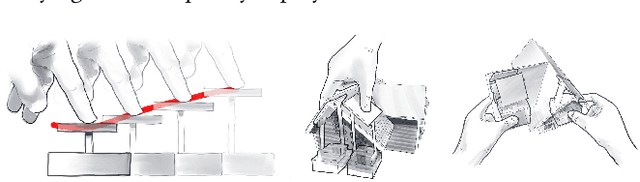
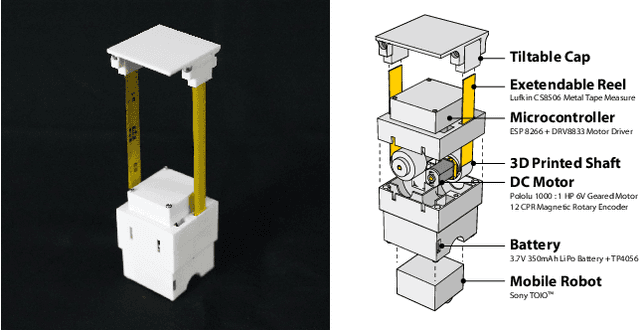
HapticBots introduces a novel encountered-type haptic approach for Virtual Reality (VR) based on multiple tabletop-size shape-changing robots. These robots move on a tabletop and change their height and orientation to haptically render various surfaces and objects on-demand. Compared to previous encountered-type haptic approaches like shape displays or robotic arms, our proposed approach has an advantage in deployability, scalability, and generalizability -- these robots can be easily deployed due to their compact form factor. They can support multiple concurrent touch points in a large area thanks to the distributed nature of the robots. We propose and evaluate a novel set of interactions enabled by these robots which include: 1) rendering haptics for VR objects by providing just-in-time touch-points on the user's hand, 2) simulating continuous surfaces with the concurrent height and position change, and 3) enabling the user to pick up and move VR objects through graspable proxy objects. Finally, we demonstrate HapticBots with various applications, including remote collaboration, education and training, design and 3D modeling, and gaming and entertainment.