 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoordinate descent on the orthogonal group for recurrent neural network training
Jul 30, 2021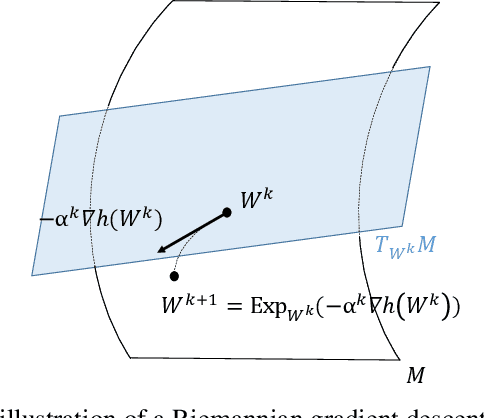

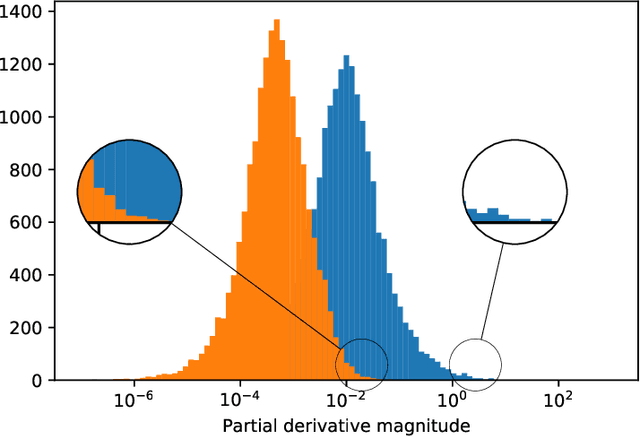
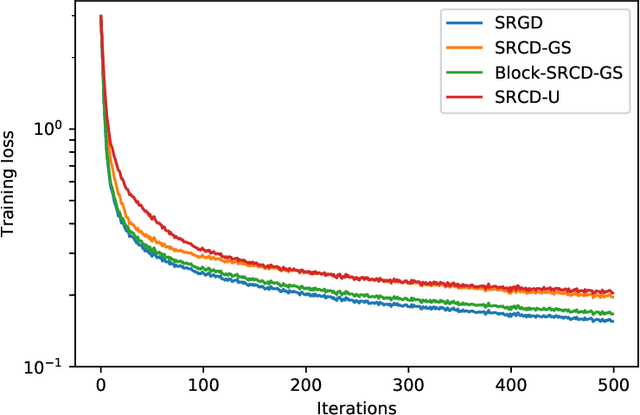
We propose to use stochastic Riemannian coordinate descent on the orthogonal group for recurrent neural network training. The algorithm rotates successively two columns of the recurrent matrix, an operation that can be efficiently implemented as a multiplication by a Givens matrix. In the case when the coordinate is selected uniformly at random at each iteration, we prove the convergence of the proposed algorithm under standard assumptions on the loss function, stepsize and minibatch noise. In addition, we numerically demonstrate that the Riemannian gradient in recurrent neural network training has an approximately sparse structure. Leveraging this observation, we propose a faster variant of the proposed algorithm that relies on the Gauss-Southwell rule. Experiments on a benchmark recurrent neural network training problem are presented to demonstrate the effectiveness of the proposed algorithm.
Global optimization using random embeddings
Jul 26, 2021
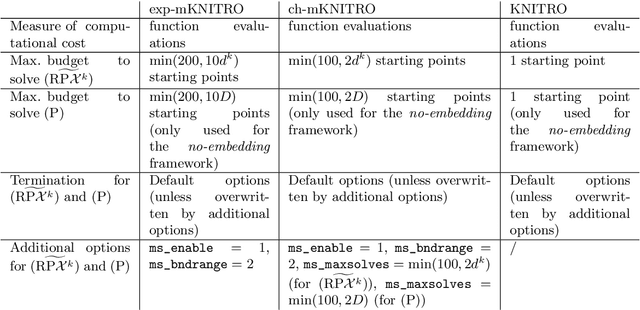


We propose a random-subspace algorithmic framework for global optimization of Lipschitz-continuous objectives, and analyse its convergence using novel tools from conic integral geometry. X-REGO randomly projects, in a sequential or simultaneous manner, the high-dimensional original problem into low-dimensional subproblems that can then be solved with any global, or even local, optimization solver. We estimate the probability that the randomly-embedded subproblem shares (approximately) the same global optimum as the original problem. This success probability is then used to show convergence of X-REGO to an approximate global solution of the original problem, under weak assumptions on the problem (having a strictly feasible global solution) and on the solver (guaranteed to find an approximate global solution of the reduced problem with sufficiently high probability). In the particular case of unconstrained objectives with low effective dimension, that only vary over a low-dimensional subspace, we propose an X-REGO variant that explores random subspaces of increasing dimension until finding the effective dimension of the problem, leading to X-REGO globally converging after a finite number of embeddings, proportional to the effective dimension. We show numerically that this variant efficiently finds both the effective dimension and an approximate global minimizer of the original problem.
Fitting, Comparison, and Alignment of Trajectories on Positive Semi-Definite Matrices with Application to Action Recognition
Sep 09, 2019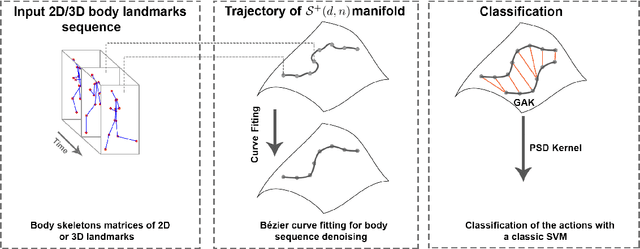
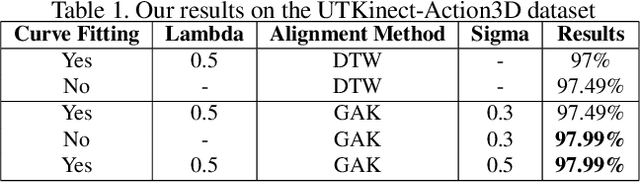
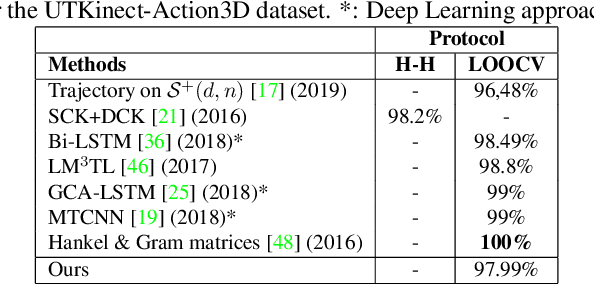

In this paper, we tackle the problem of action recognition using body skeletons extracted from video sequences. Our approach lies in the continuity of recent works representing video frames by Gramian matrices that describe a trajectory on the Riemannian manifold of positive-semidefinite matrices of fixed rank. In comparison with previous works, the manifold of fixed-rank positive-semidefinite matrices is here endowed with a different metric, and we resort to different algorithms for the curve fitting and temporal alignment steps. We evaluated our approach on three publicly available datasets (UTKinect-Action3D, KTH-Action and UAV-Gesture). The results of the proposed approach are competitive with respect to state-of-the-art methods, while only involving body skeletons.