 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIdentifying Driver Behaviors using Trajectory Features for Vehicle Navigation
Mar 16, 2018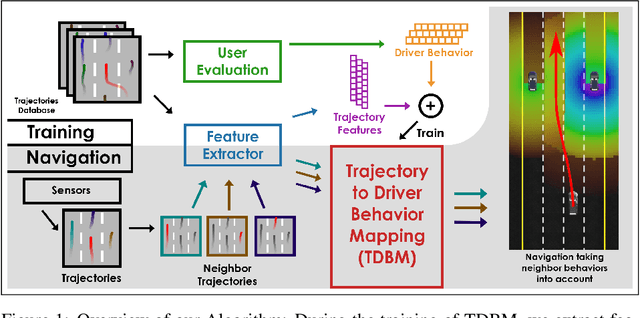
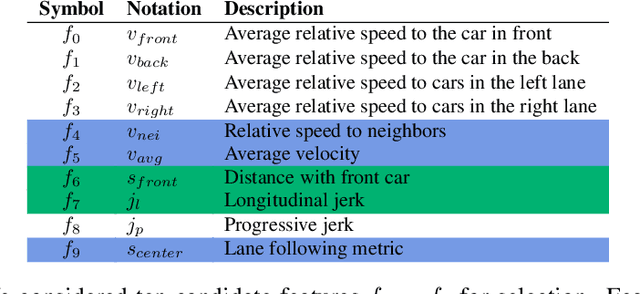

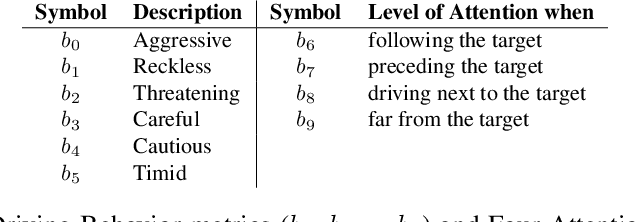
We present a novel approach to automatically identify driver behaviors from vehicle trajectories and use them for safe navigation of autonomous vehicles. We propose a novel set of features that can be easily extracted from car trajectories. We derive a data-driven mapping between these features and six driver behaviors using an elaborate web-based user study. We also compute a summarized score indicating a level of awareness that is needed while driving next to other vehicles. We also incorporate our algorithm into a vehicle navigation simulation system and demonstrate its benefits in terms of safer real-time navigation, while driving next to aggressive or dangerous drivers.
LCrowdV: Generating Labeled Videos for Simulation-based Crowd Behavior Learning
Jul 04, 2016
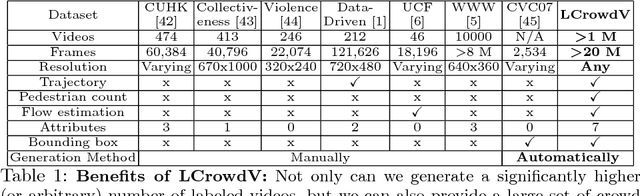
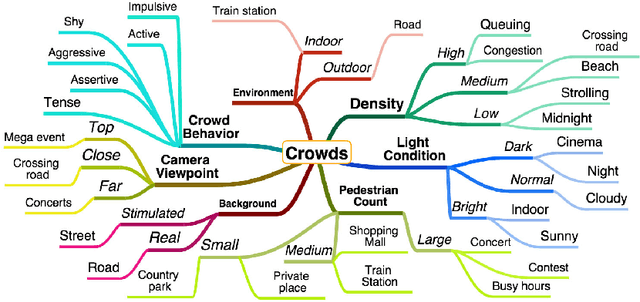
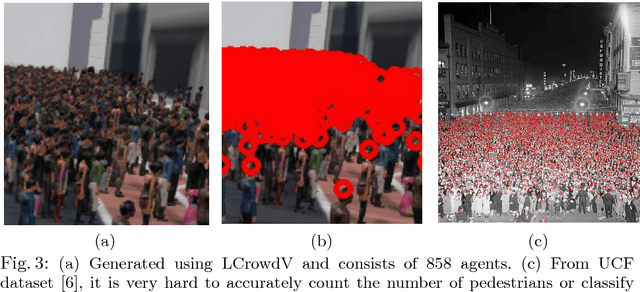
We present a novel procedural framework to generate an arbitrary number of labeled crowd videos (LCrowdV). The resulting crowd video datasets are used to design accurate algorithms or training models for crowded scene understanding. Our overall approach is composed of two components: a procedural simulation framework for generating crowd movements and behaviors, and a procedural rendering framework to generate different videos or images. Each video or image is automatically labeled based on the environment, number of pedestrians, density, behavior, flow, lighting conditions, viewpoint, noise, etc. Furthermore, we can increase the realism by combining synthetically-generated behaviors with real-world background videos. We demonstrate the benefits of LCrowdV over prior lableled crowd datasets by improving the accuracy of pedestrian detection and crowd behavior classification algorithms. LCrowdV would be released on the WWW.