 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
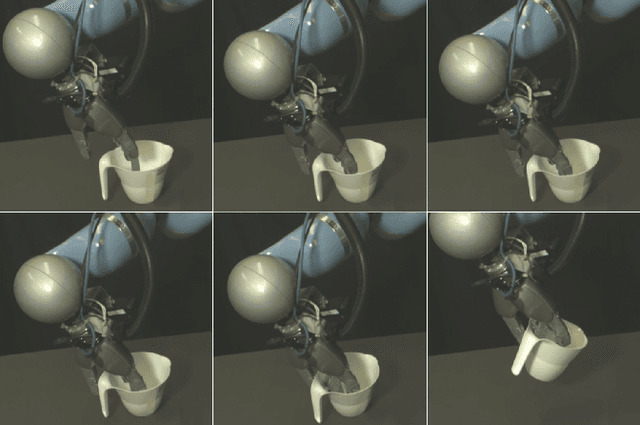
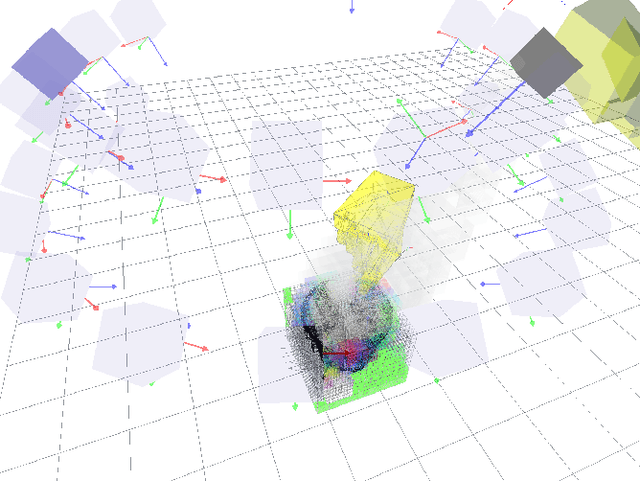
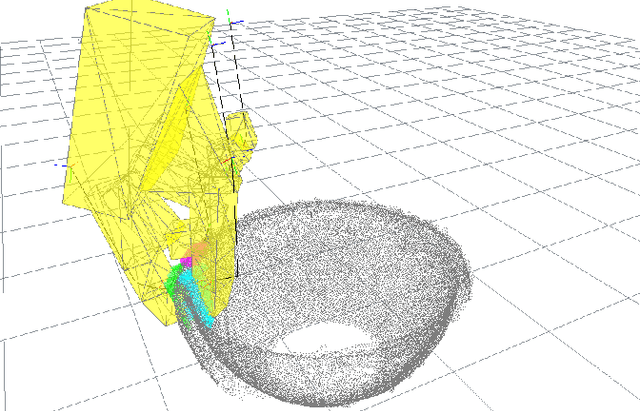
Add to EdgeGenerative grasp synthesis from demonstration using parametric mixtures
Jun 27, 2019
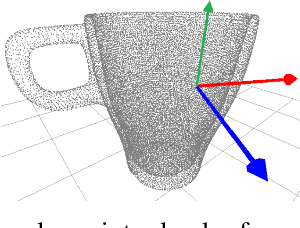
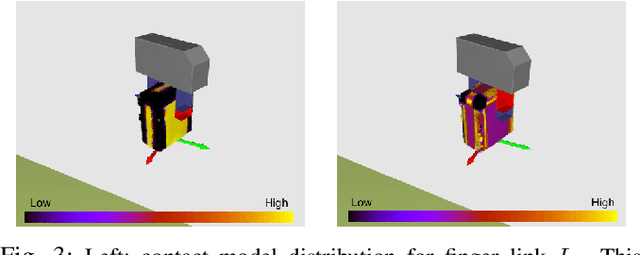
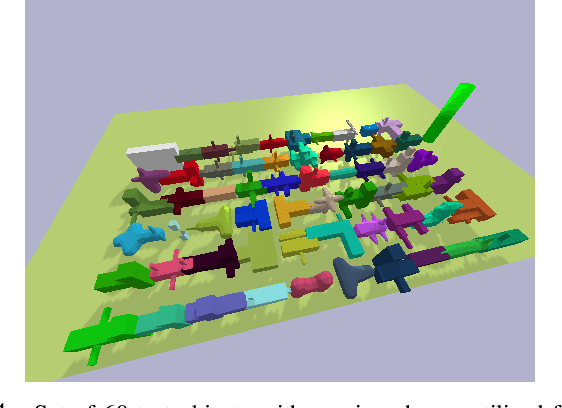
We present a parametric formulation for learning generative models for grasp synthesis from a demonstration. We cast new light on this family of approaches, proposing a parametric formulation for grasp synthesis that is computationally faster compared to related work and indicates better grasp success rate performance in simulated experiments, showing a gain of at least 10% success rate (p < 0.05) in all the tested conditions. The proposed implementation is also able to incorporate arbitrary constraints for grasp ranking that may include task-specific constraints. Results are reported followed by a brief discussion on the merits of the proposed methods noted so far.
Uncertainty Averse Pushing with Model Predictive Path Integral Control
Oct 15, 2017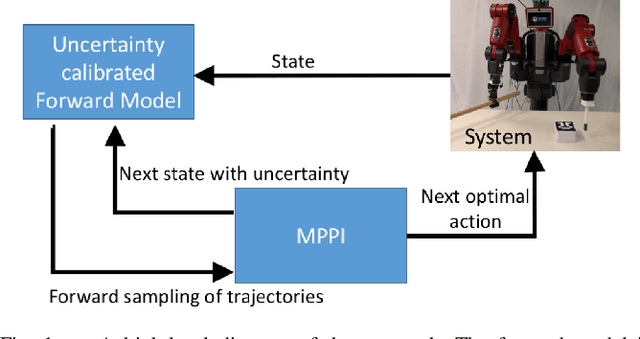
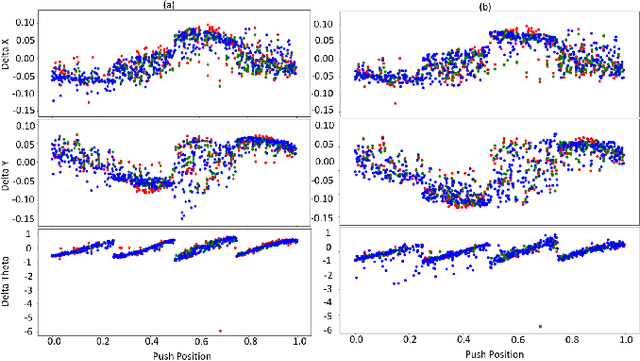
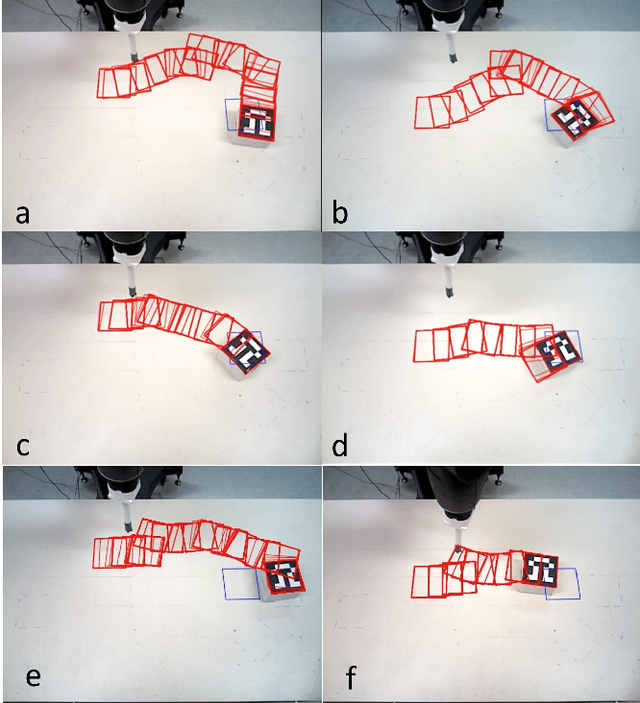
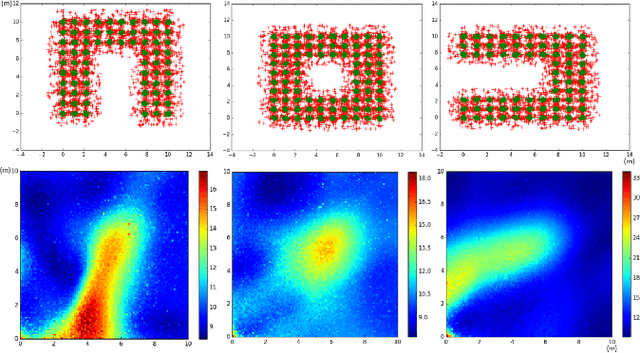
Planning robust robot manipulation requires good forward models that enable robust plans to be found. This work shows how to achieve this using a forward model learned from robot data to plan push manipulations. We explore learning methods (Gaussian Process Regression, and an Ensemble of Mixture Density Networks) that give estimates of the uncertainty in their predictions. These learned models are utilised by a model predictive path integral (MPPI) controller to plan how to push the box to a goal location. The planner avoids regions of high predictive uncertainty in the forward model. This includes both inherent uncertainty in dynamics, and meta uncertainty due to limited data. Thus, pushing tasks are completed in a robust fashion with respect to estimated uncertainty in the forward model and without the need of differentiable cost functions. We demonstrate the method on a real robot, and show that learning can outperform physics simulation. Using simulation, we also show the ability to plan uncertainty averse paths.
Active vision for dexterous grasping of novel objects
Aug 14, 2017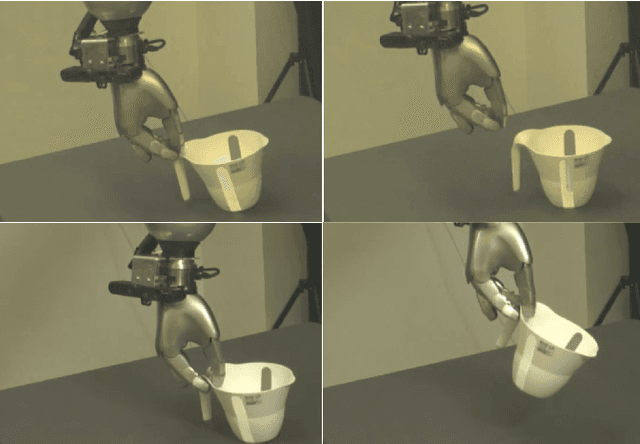
How should a robot direct active vision so as to ensure reliable grasping? We answer this question for the case of dexterous grasping of unfamiliar objects. By dexterous grasping we simply mean grasping by any hand with more than two fingers, such that the robot has some choice about where to place each finger. Such grasps typically fail in one of two ways, either unmodeled objects in the scene cause collisions or object reconstruction is insufficient to ensure that the grasp points provide a stable force closure. These problems can be solved more easily if active sensing is guided by the anticipated actions. Our approach has three stages. First, we take a single view and generate candidate grasps from the resulting partial object reconstruction. Second, we drive the active vision approach to maximise surface reconstruction quality around the planned contact points. During this phase, the anticipated grasp is continually refined. Third, we direct gaze to improve the safety of the planned reach to grasp trajectory. We show, on a dexterous manipulator with a camera on the wrist, that our approach (80.4% success rate) outperforms a randomised algorithm (64.3% success rate).