 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAPFAST: A Deep Algorithm Selector for Multi Agent Path Finding using Shortest Path Embeddings
Feb 24, 2021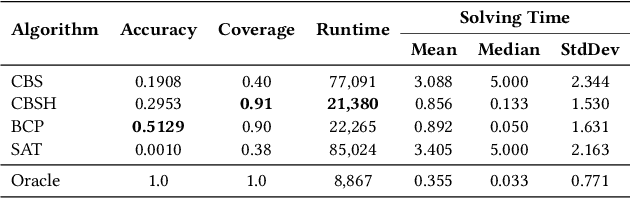
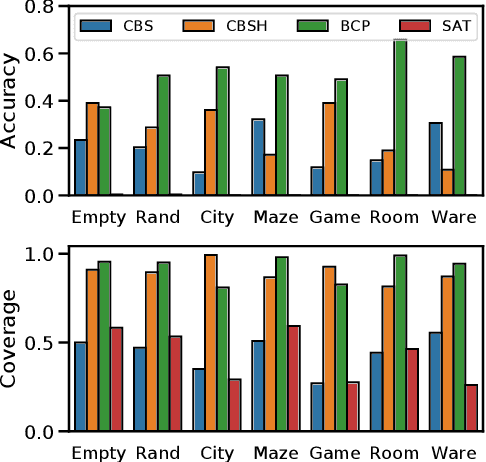
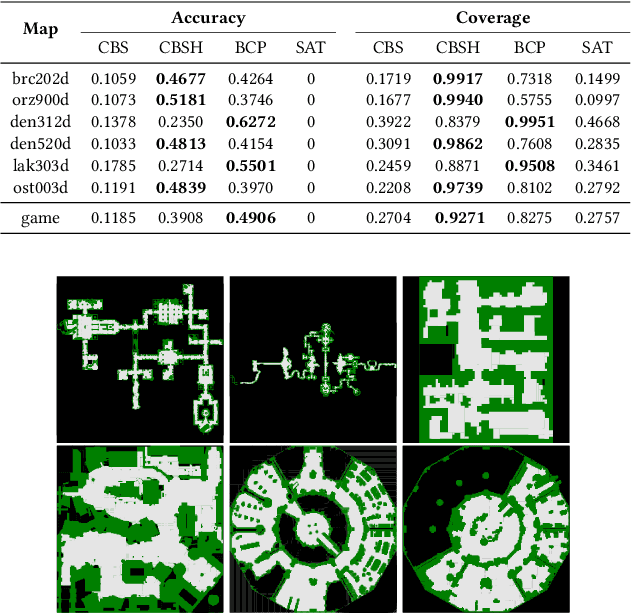
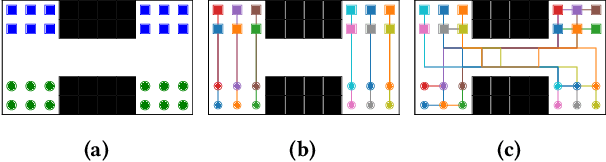
Solving the Multi-Agent Path Finding (MAPF) problem optimally is known to be NP-Hard for both make-span and total arrival time minimization. While many algorithms have been developed to solve MAPF problems, there is no dominating optimal MAPF algorithm that works well in all types of problems and no standard guidelines for when to use which algorithm. In this work, we develop the deep convolutional network MAPFAST (Multi-Agent Path Finding Algorithm SelecTor), which takes a MAPF problem instance and attempts to select the fastest algorithm to use from a portfolio of algorithms. We improve the performance of our model by including single-agent shortest paths in the instance embedding given to our model and by utilizing supplemental loss functions in addition to a classification loss. We evaluate our model on a large and diverse dataset of MAPF instances, showing that it outperforms all individual algorithms in its portfolio as well as the state-of-the-art optimal MAPF algorithm selector. We also provide an analysis of algorithm behavior in our dataset to gain a deeper understanding of optimal MAPF algorithms' strengths and weaknesses to help other researchers leverage different heuristics in algorithm designs.
End to end learning and optimization on graphs
May 31, 2019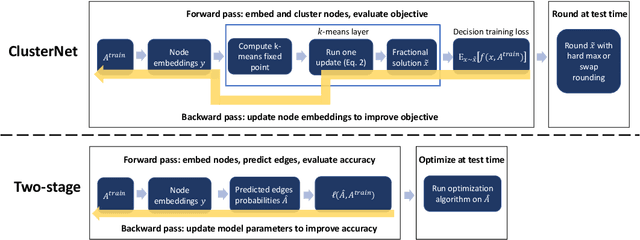
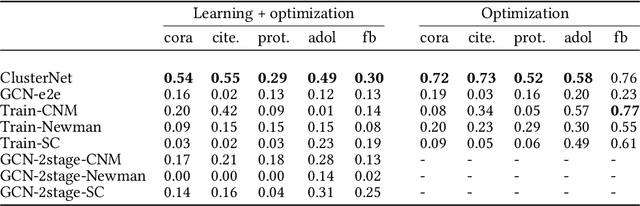
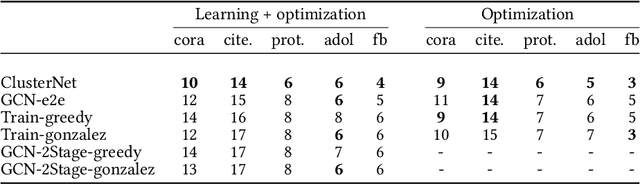
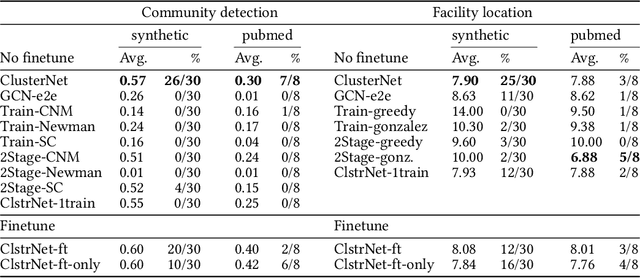
Real-world applications often combine learning and optimization problems on graphs. For instance, our objective may be to cluster the graph in order to detect meaningful communities (or solve other common graph optimization problems such as facility location, maxcut, and so on). However, graphs or related attributes are often only partially observed, introducing learning problems such as link prediction which must be solved prior to optimization. We propose an approach to integrate a differentiable proxy for common graph optimization problems into training of machine learning models for tasks such as link prediction. This allows the model to focus specifically on the downstream task that its predictions will be used for. Experimental results show that our end-to-end system obtains better performance on example optimization tasks than can be obtained by combining state of the art link prediction methods with expert-designed graph optimization algorithms.
Decision-Focused Learning of Adversary Behavior in Security Games
Mar 03, 2019
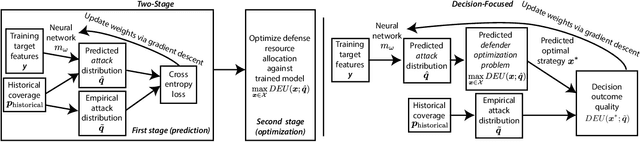
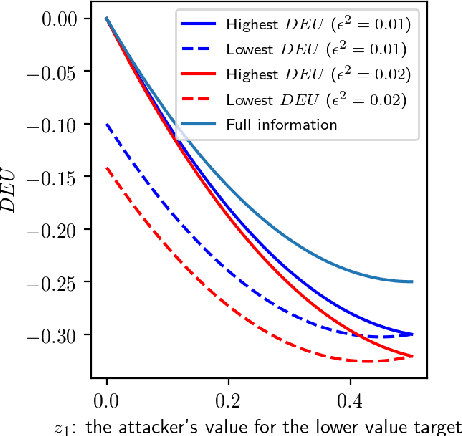
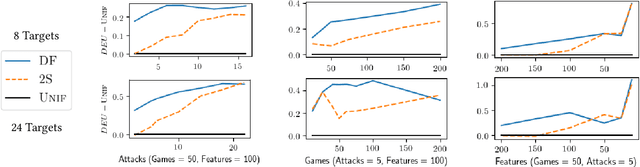
Stackelberg security games are a critical tool for maximizing the utility of limited defense resources to protect important targets from an intelligent adversary. Motivated by green security, where the defender may only observe an adversary's response to defense on a limited set of targets, we study the problem of defending against the same adversary on a larger set of targets from the same distribution. We give a theoretical justification for why standard two-stage learning approaches, where a model of the adversary is trained for predictive accuracy and then optimized against, may fail to maximize the defender's expected utility in this setting. We develop a decision-focused learning approach, where the adversary behavior model is optimized for decision quality, and show empirically that it achieves higher defender expected utility than the two-stage approach when there is limited training data and a large number of target features.