 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Industrial Dataset for Scene Acquisitions and Functional Schematics Alignment
Feb 17, 2026Aligning functional schematics with 2D and 3D scene acquisitions is crucial for building digital twins, especially for old industrial facilities that lack native digital models. Current manual alignment using images and LiDAR data does not scale due to tediousness and complexity of industrial sites. Inconsistencies between schematics and reality, and the scarcity of public industrial datasets, make the problem both challenging and underexplored. This paper introduces IRIS-v2, a comprehensive dataset to support further research. It includes images, point clouds, 2D annotated boxes and segmentation masks, a CAD model, 3D pipe routing information, and the P&ID (Piping and Instrumentation Diagram). The alignment is experimented on a practical case study, aiming at reducing the time required for this task by combining segmentation and graph matching.
Leveraging edge detection and neural networks for better UAV localization
Apr 09, 2024



We propose a novel method for geolocalizing Unmanned Aerial Vehicles (UAVs) in environments lacking Global Navigation Satellite Systems (GNSS). Current state-of-the-art techniques employ an offline-trained encoder to generate a vector representation (embedding) of the UAV's current view, which is then compared with pre-computed embeddings of geo-referenced images to determine the UAV's position. Here, we demonstrate that the performance of these methods can be significantly enhanced by preprocessing the images to extract their edges, which exhibit robustness to seasonal and illumination variations. Furthermore, we establish that utilizing edges enhances resilience to orientation and altitude inaccuracies. Additionally, we introduce a confidence criterion for localization. Our findings are substantiated through synthetic experiments.
Automatic Stockpile Volume Monitoring using Multi-view Stereo from SkySat Imagery
Mar 01, 2021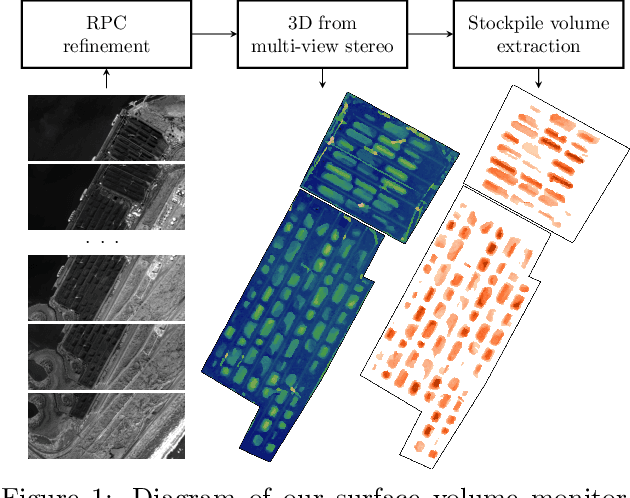
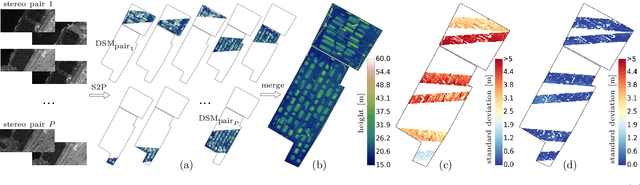
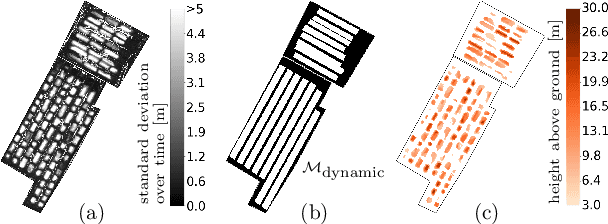
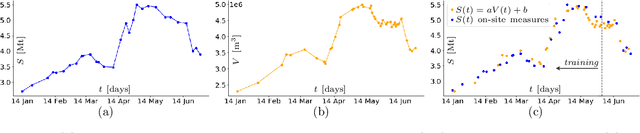
This paper proposes a system for automatic surface volume monitoring from time series of SkySat pushframe imagery. A specific challenge of building and comparing large 3D models from SkySat data is to correct inconsistencies between the camera models associated to the multiple views that are necessary to cover the area at a given time, where these camera models are represented as Rational Polynomial Cameras (RPCs). We address the problem by proposing a date-wise RPC refinement, able to handle dynamic areas covered by sets of partially overlapping views. The cameras are refined by means of a rotation that compensates for errors due to inaccurate knowledge of the satellite attitude. The refined RPCs are then used to reconstruct multiple consistent Digital Surface Models (DSMs) from different stereo pairs at each date. RPC refinement strengthens the consistency between the DSMs of each date, which is extremely beneficial to accurately measure volumes in the 3D surface models. The system is tested in a real case scenario, to monitor large coal stockpiles. Our volume estimates are validated with measurements collected on site in the same period of time.
Accurate Motion Estimation through Random Sample Aggregated Consensus
Jan 19, 2017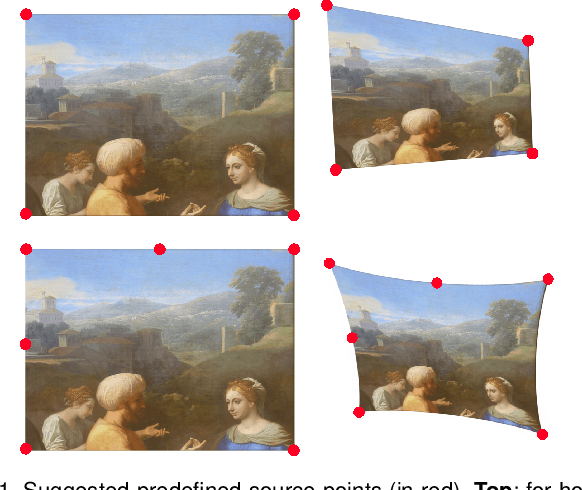
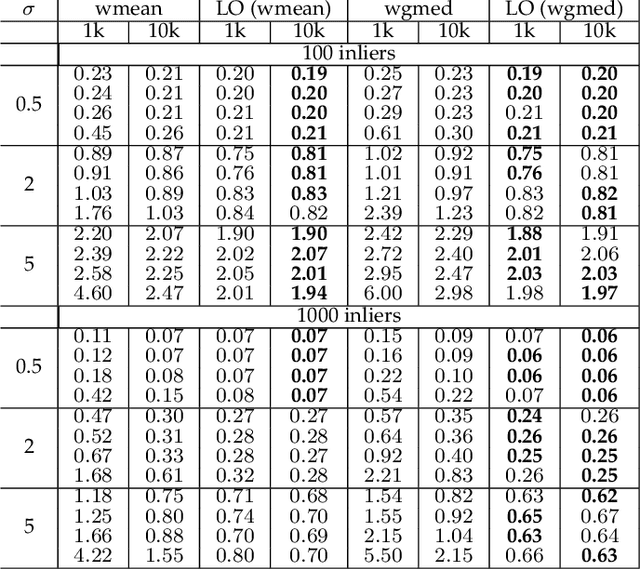
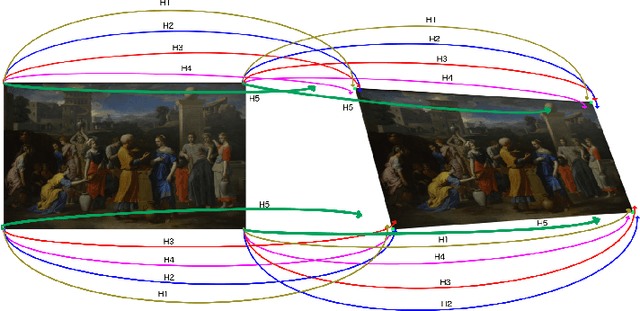
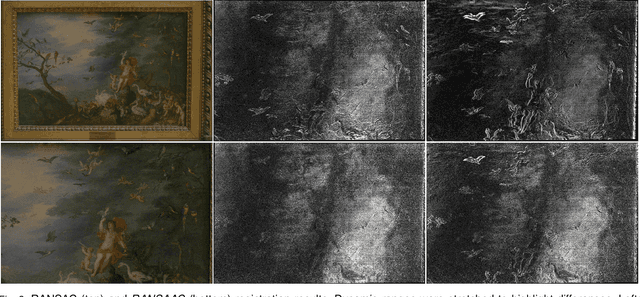
We reconsider the classic problem of estimating accurately a 2D transformation from point matches between images containing outliers. RANSAC discriminates outliers by randomly generating minimalistic sampled hypotheses and verifying their consensus over the input data. Its response is based on the single hypothesis that obtained the largest inlier support. In this article we show that the resulting accuracy can be improved by aggregating all generated hypotheses. This yields RANSAAC, a framework that improves systematically over RANSAC and its state-of-the-art variants by statistically aggregating hypotheses. To this end, we introduce a simple strategy that allows to rapidly average 2D transformations, leading to an almost negligible extra computational cost. We give practical applications on projective transforms and homography+distortion models and demonstrate a significant performance gain in both cases.
FALDOI: A new minimization strategy for large displacement variational optical flow
Sep 29, 2016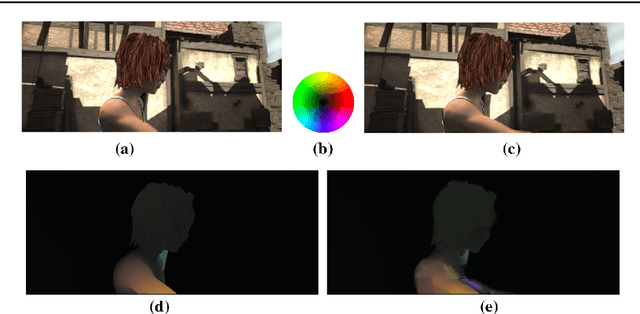
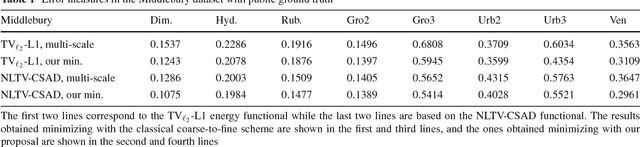
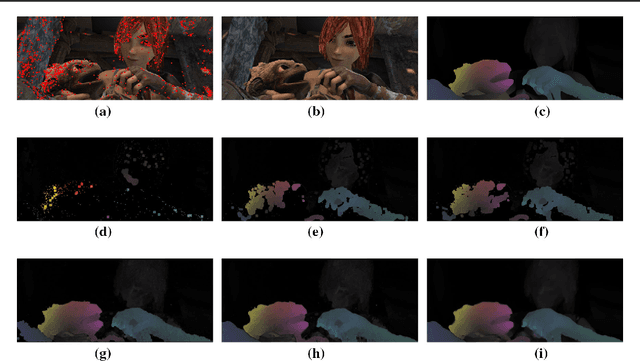
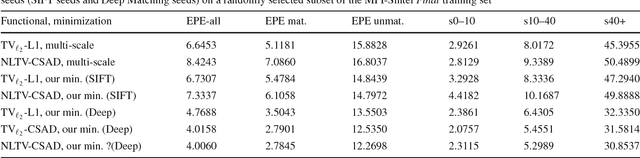
We propose a large displacement optical flow method that introduces a new strategy to compute a good local minimum of any optical flow energy functional. The method requires a given set of discrete matches, which can be extremely sparse, and an energy functional which locally guides the interpolation from those matches. In particular, the matches are used to guide a structured coordinate-descent of the energy functional around these keypoints. It results in a two-step minimization method at the finest scale which is very robust to the inevitable outliers of the sparse matcher and able to capture large displacements of small objects. Its benefits over other variational methods that also rely on a set of sparse matches are its robustness against very few matches, high levels of noise and outliers. We validate our proposal using several optical flow variational models. The results consistently outperform the coarse-to-fine approaches and achieve good qualitative and quantitative performance on the standard optical flow benchmarks.