 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning Based Active Spatial Channel Gain Prediction Using a Swarm of Unmanned Aerial Vehicles
Oct 06, 2023Prediction of wireless channel gain (CG) across space is a necessary tool for many important wireless network design problems. In this paper, we develop prediction methods that use environment-specific features, namely building maps and CG measurements, to achieve high prediction accuracy. We assume that measurements are collected using a swarm of coordinated unmanned aerial vehicles (UAVs). We develop novel active prediction approaches which consist of both methods for UAV path planning for optimal measurement collection and methods for prediction of CG across space based on the collected measurements. We propose two active prediction approaches based on deep learning (DL) and Kriging interpolation. The first approach does not rely on the location of the transmitter and utilizes 3D maps to compensate for the lack of it. We utilize DL to incorporate 3D maps into prediction and reinforcement learning for optimal path planning for the UAVs based on DL prediction. The second active prediction approach is based on Kriging interpolation, which requires known transmitter location and cannot utilize 3D maps. We train and evaluate the two proposed approaches in a ray-tracing-based channel simulator. Using simulations, we demonstrate the importance of active prediction compared to prediction based on randomly collected measurements of channel gain. Furthermore, we show that using DL and 3D maps, we can achieve high prediction accuracy even without knowing the transmitter location. We also demonstrate the importance of coordinated path planning for active prediction when using multiple UAVs compared to UAVs collecting measurements independently in a greedy manner.
REM-U-net: Deep Learning Based Agile REM Prediction with Energy-Efficient Cell-Free Use Case
Sep 21, 2023Radio environment maps (REMs) hold a central role in optimizing wireless network deployment, enhancing network performance, and ensuring effective spectrum management. Conventional REM prediction methods are either excessively time-consuming, e.g., ray tracing, or inaccurate, e.g., statistical models, limiting their adoption in modern inherently dynamic wireless networks. Deep-learning-based REM prediction has recently attracted considerable attention as an appealing, accurate, and time-efficient alternative. However, existing works on REM prediction using deep learning are either confined to 2D maps or use a limited dataset. In this paper, we introduce a runtime-efficient REM prediction framework based on u-nets, trained on a large-scale 3D maps dataset. In addition, data preprocessing steps are investigated to further refine the REM prediction accuracy. The proposed u-net framework, along with preprocessing steps, are evaluated in the context of the 2023 IEEE ICASSP Signal Processing Grand Challenge, namely, the First Pathloss Radio Map Prediction Challenge. The evaluation results demonstrate that the proposed method achieves an average normalized root-mean-square error (RMSE) of 0.045 with an average of 14 milliseconds (ms) runtime. Finally, we position our achieved REM prediction accuracy in the context of a relevant cell-free massive multiple-input multiple-output (CF-mMIMO) use case. We demonstrate that one can obviate consuming energy on large-scale fading measurements and rely on predicted REM instead to decide on which sleep access points (APs) to switch on in a CF-mMIMO network that adopts a minimum propagation loss AP switch ON/OFF strategy.
GAN-RXA: A Practical Scalable Solution to Receiver-Agnostic Transmitter Fingerprinting
Mar 25, 2023Radio frequency fingerprinting has been proposed for device identification. However, experimental studies also demonstrated its sensitivity to deployment changes. Recent works have addressed channel impacts by developing robust algorithms accounting for time and location variability, but the impacts of receiver impairments on transmitter fingerprints are yet to be solved. In this work, we investigat the receiver-agnostic transmitter fingerprinting problem, and propose a novel two-stage supervised learning framework (RXA) to address it. In the first stage, our approach calibrates a receiver-agnostic transmitter feature-extractor. We also propose two deep-learning approaches (SD-RXA and GAN-RXA) in this first stage to improve the receiver-agnostic property of the RXA framework. In the second stage, the calibrated feature-extractor is utilized to train a transmitter classifier with only one receiver. We evaluate the proposed approaches on transmitter identification problem using a large-scale WiFi dataset. We show that when a trained transmitter-classifier is deployed on new receivers, the RXA framework can improve the classification accuracy by 19.5%, and the outlier detection rate by 10.0% compared to a naive approach without calibration. Moreover, GAN-RXA can further increase the closed-set classification accuracy by 5.0%, and the outlier detection rate by 7.5% compared to the RXA approach.
Multiband Massive IoT: A Learning Approach to Infrastructure Deployment
Jun 13, 2022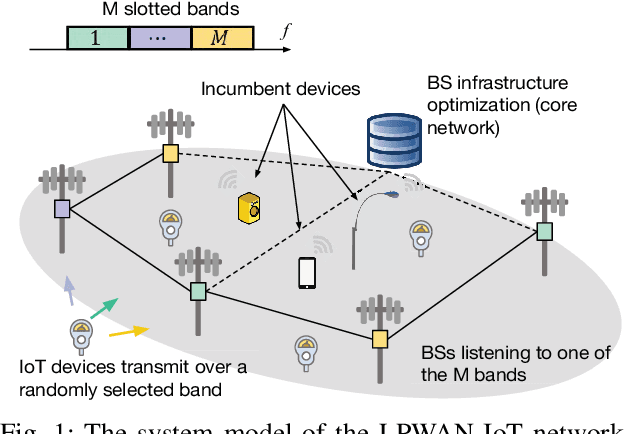
We consider a novel ultra-narrowband (UNB) low-power wide-area network (LPWAN) architecture design for uplink transmission of a massive number of Internet of Things (IoT) devices over multiple multiplexing bands. An IoT device can randomly choose any of the multiplexing bands to transmit its packet. Due to hardware constraints, a base station (BS) is able to listen to only one multiplexing band. Our main objective is to maximize the packet decoding probability (PDP) by optimizing the placement of the BSs and frequency assignment of BSs to multiplexing bands. We develop two online approaches that adapt to the environment based on the statistics of (un)successful packets at the BSs. The first approach is based on a predefined model of the environment, while the second approach is measurement-based model-free approach, which is applicable to any environment. The benefit of the model-based approach is a lower training complexity, at the risk of a poor fit in a model-incompatible environment. The simulation results show that our proposed approaches to band assignment and BS placement offer significant improvement in PDP over baseline random approaches and perform closely to the theoretical upper bound.
Feedback Free Distributed Transmit Beamforming using Guided Directionality
Aug 04, 2021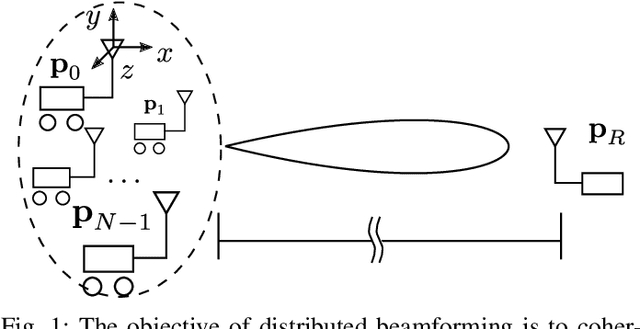


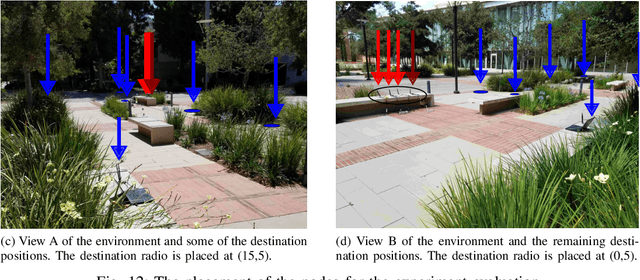
Distributed transmit beamforming enables cooperative radios to act as one virtual antenna array, extending their communications' range beyond the capabilities of a single radio. Most existing distributed beamforming approaches rely on the destination radio sending feedback to adjust the transmitters' signals for coherent combining. However, relying on the destination radio's feedback limits the communications range to that of a single radio. Existing feedback free approaches rely on phase synchronization and knowing the node locations with sub-wavelength accuracy, which becomes impractical for radios mounted on high-mobility platforms like UAVs. In this work, we propose and demonstrate a feedback free distributed beamforming approach that leverages the radio's mobility and coarse location information in a dominant line-of-sight channel. In the proposed approach, one radio acts as a guide and moves to point the beam of the remaining radios towards the destination. We specify the radios' position requirements and verify their relation to the combined signal at the destination using simulations. A proof of concept demo was implemented using software defined radios, showing up to 9dB SNR improvement in the beamforming direction just by relying on the coarse placement of four radios.
UAV Swarm Position Optimization for High Capacity MIMO Backhaul
Apr 29, 2021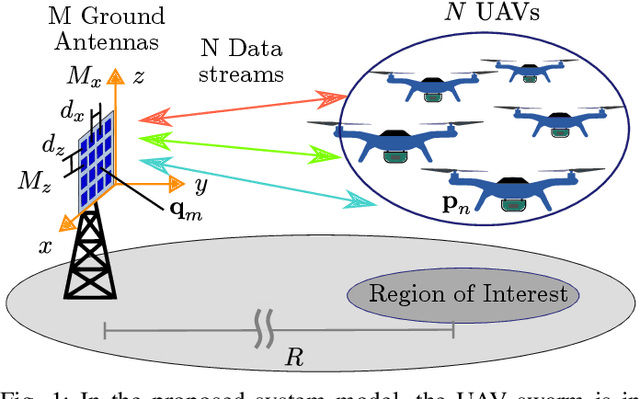
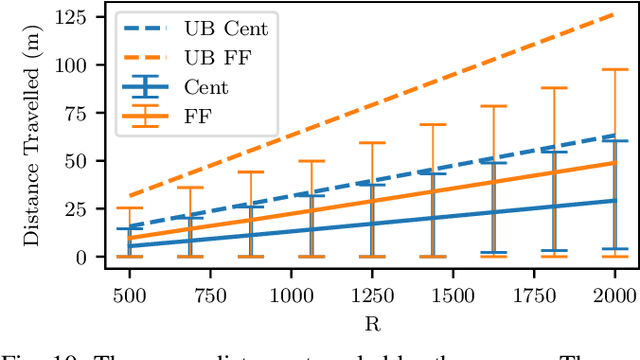
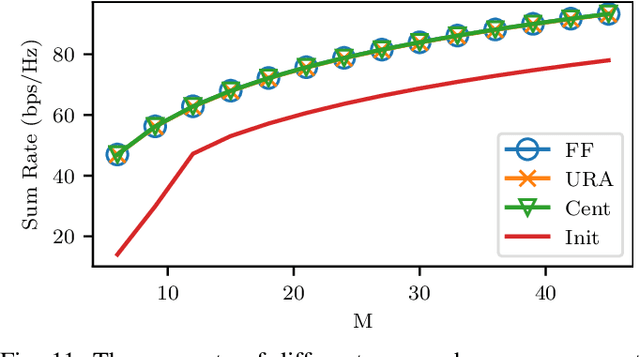
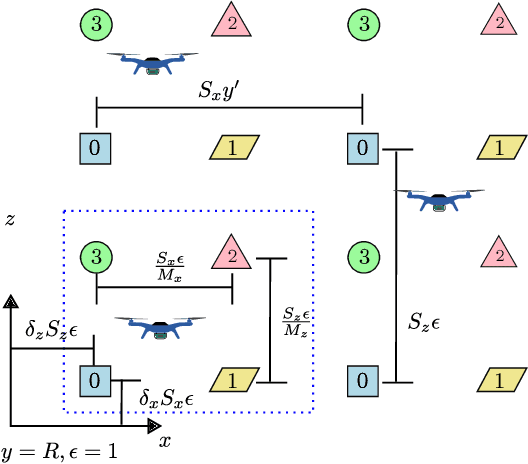
A swarm of cooperating UAVs communicating with a distant multiantenna ground station can leverage MIMO spatial multiplexing to scale the capacity. Due to the line-of-sight propagation between the swarm and the ground station, the MIMO channel is highly correlated, leading to limited multiplexing gains. In this paper, we optimize the UAV positions to attain the maximum MIMO capacity given by the single user bound. An infinite set of UAV placements that attains the capacity bound is first derived. Given an initial swarm placement, we formulate the problem of minimizing the distance traveled by the UAVs to reach a placement within the capacity maximizing set of positions. An offline centralized solution to the problem using block coordinate descent is developed assuming known initial positions of UAVs. We also propose an online distributed algorithm, where the UAVs iteratively adjust their positions to maximize the capacity. Our proposed approaches are shown to significantly increase the capacity at the expense of a bounded translation from the initial UAV placements. This capacity increase persists when using a massive MIMO ground station. Using numerical simulations, we show the robustness of our approaches in a Rician channel under UAV motion disturbances.