 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMelody predominates over harmony in the evolution of musical scales across 96 countries
Aug 22, 2024The standard theory of musical scales since antiquity has been based on harmony, rather than melody. Some recent analyses support either view, and we lack a comparative test on cross-cultural data. We address this longstanding problem through a rigorous, computational comparison of the main theories against 1,314 scales from 96 countries. There is near-universal support for melodic theories, which predict step-sizes of 1-3 semitones. Harmony accounts for the prevalence of some simple-integer-ratio intervals, particularly for music-theoretic scales from Eurasian societies, which may explain their dominance amongst Western scholars. However, harmony poorly predicts scales measured from ethnographic recordings, particularly outside of Eurasia. Overall, we show that the historical emphasis on harmony is misguided and that melody is the primary determinant of the world's musical scales.
Humans' Assessment of Robots as Moral Regulators: Importance of Perceived Fairness and Legitimacy
Oct 10, 2021
Previous research has shown that the fairness and the legitimacy of a moral decision-maker are important for people's acceptance of and compliance with the decision-maker. As technology rapidly advances, there have been increasing hopes and concerns about building artificially intelligent entities that are designed to intervene against norm violations. However, it is unclear how people would perceive artificial moral regulators that impose punishment on human wrongdoers. Grounded in theories of psychology and law, we predict that the perceived fairness of punishment imposed by a robot would increase the legitimacy of the robot functioning as a moral regulator, which would in turn, increase people's willingness to accept and comply with the robot's decisions. We close with a conceptual framework for building a robot moral regulator that successfully can regulate norm violations.
Communicating Robot Arm Motion Intent Through Mixed Reality Head-mounted Displays
Aug 11, 2017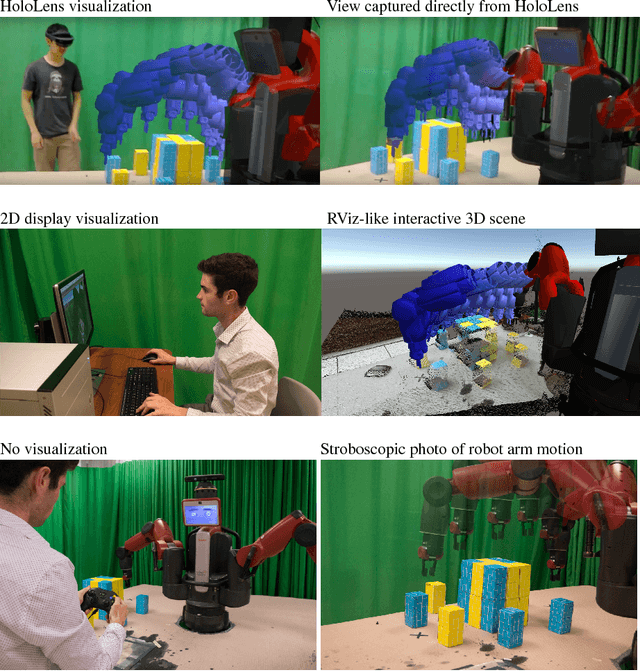
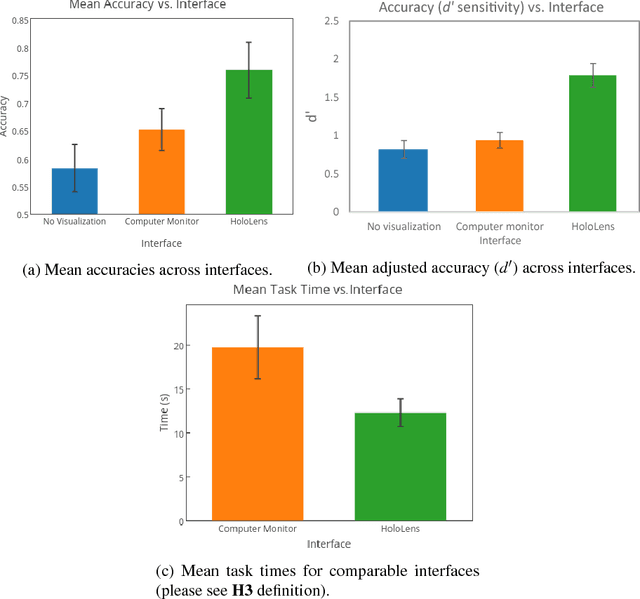
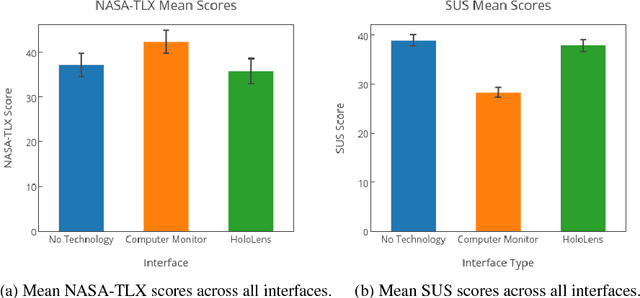
Efficient motion intent communication is necessary for safe and collaborative work environments with collocated humans and robots. Humans efficiently communicate their motion intent to other humans through gestures, gaze, and social cues. However, robots often have difficulty efficiently communicating their motion intent to humans via these methods. Many existing methods for robot motion intent communication rely on 2D displays, which require the human to continually pause their work and check a visualization. We propose a mixed reality head-mounted display visualization of the proposed robot motion over the wearer's real-world view of the robot and its environment. To evaluate the effectiveness of this system against a 2D display visualization and against no visualization, we asked 32 participants to labeled different robot arm motions as either colliding or non-colliding with blocks on a table. We found a 16% increase in accuracy with a 62% decrease in the time it took to complete the task compared to the next best system. This demonstrates that a mixed-reality HMD allows a human to more quickly and accurately tell where the robot is going to move than the compared baselines.