 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommunicating Robot Arm Motion Intent Through Mixed Reality Head-mounted Displays
Paper and Code
Aug 11, 2017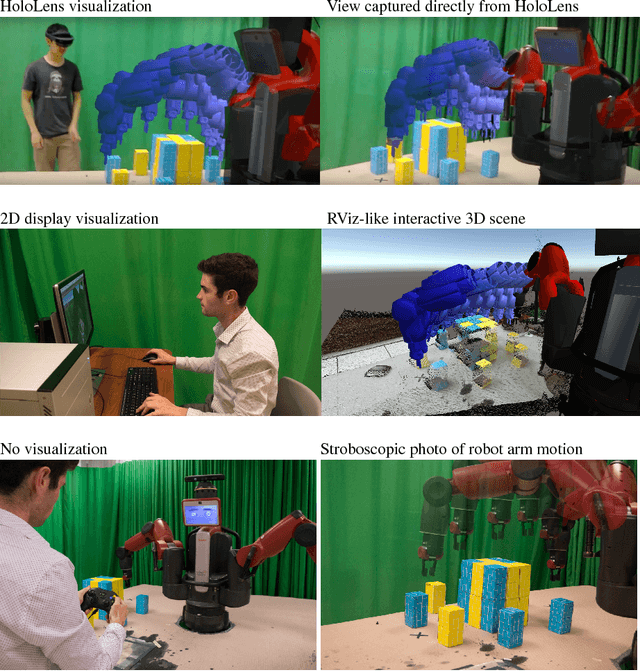
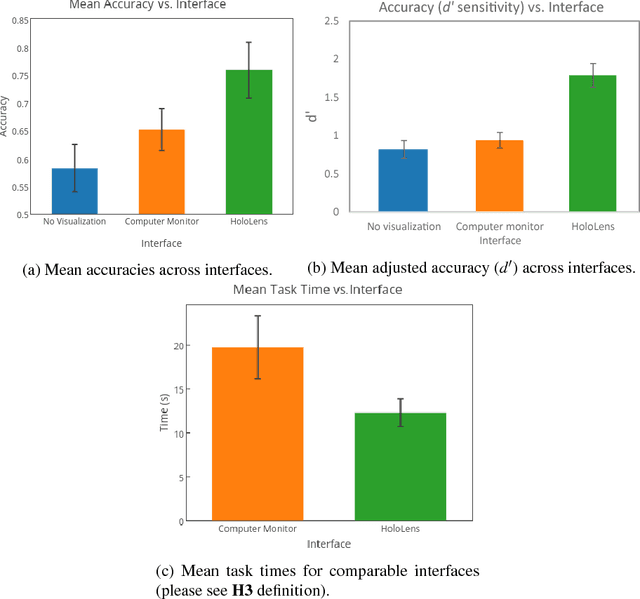
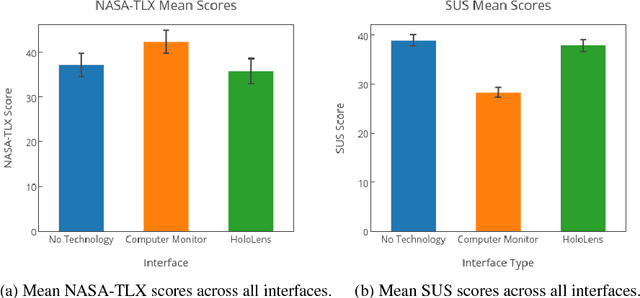
Efficient motion intent communication is necessary for safe and collaborative work environments with collocated humans and robots. Humans efficiently communicate their motion intent to other humans through gestures, gaze, and social cues. However, robots often have difficulty efficiently communicating their motion intent to humans via these methods. Many existing methods for robot motion intent communication rely on 2D displays, which require the human to continually pause their work and check a visualization. We propose a mixed reality head-mounted display visualization of the proposed robot motion over the wearer's real-world view of the robot and its environment. To evaluate the effectiveness of this system against a 2D display visualization and against no visualization, we asked 32 participants to labeled different robot arm motions as either colliding or non-colliding with blocks on a table. We found a 16% increase in accuracy with a 62% decrease in the time it took to complete the task compared to the next best system. This demonstrates that a mixed-reality HMD allows a human to more quickly and accurately tell where the robot is going to move than the compared baselines.