 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMarkerless 3D human pose tracking through multiple cameras and AI: Enabling high accuracy, robustness, and real-time performance
Mar 31, 2023



Tracking 3D human motion in real-time is crucial for numerous applications across many fields. Traditional approaches involve attaching artificial fiducial objects or sensors to the body, limiting their usability and comfort-of-use and consequently narrowing their application fields. Recent advances in Artificial Intelligence (AI) have allowed for markerless solutions. However, most of these methods operate in 2D, while those providing 3D solutions compromise accuracy and real-time performance. To address this challenge and unlock the potential of visual pose estimation methods in real-world scenarios, we propose a markerless framework that combines multi-camera views and 2D AI-based pose estimation methods to track 3D human motion. Our approach integrates a Weighted Least Square (WLS) algorithm that computes 3D human motion from multiple 2D pose estimations provided by an AI-driven method. The method is integrated within the Open-VICO framework allowing simulation and real-world execution. Several experiments have been conducted, which have shown high accuracy and real-time performance, demonstrating the high level of readiness for real-world applications and the potential to revolutionize human motion capture.
Robotic needle steering in deformable tissues with extreme learning machines
Apr 02, 2021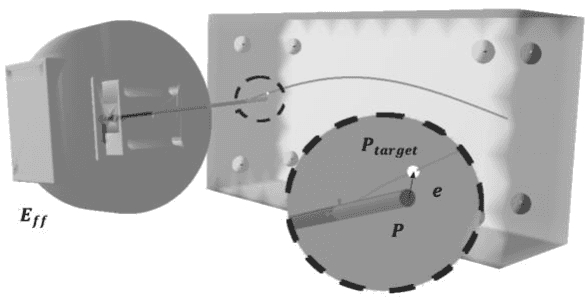
Control strategies for robotic needle steering in soft tissues must account for complex interactions between the needle and the tissue to achieve accurate needle tip positioning. Recent findings show faster robotic command rate can improve the control stability in realistic scenarios. This study proposes the use of Extreme Learning Machines to provide fast commands for robotic needle steering. A synthetic dataset based on the inverse finite element simulation control framework is used to train the model. Results show the model is capable to infer commands 66% faster than the inverse simulation and reaches acceptable precision even on previously unseen trajectories.