 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic needle steering in deformable tissues with extreme learning machines
Apr 02, 2021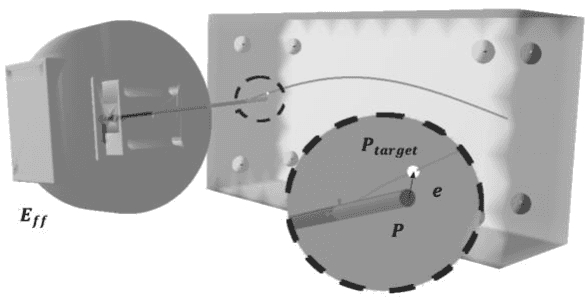
Control strategies for robotic needle steering in soft tissues must account for complex interactions between the needle and the tissue to achieve accurate needle tip positioning. Recent findings show faster robotic command rate can improve the control stability in realistic scenarios. This study proposes the use of Extreme Learning Machines to provide fast commands for robotic needle steering. A synthetic dataset based on the inverse finite element simulation control framework is used to train the model. Results show the model is capable to infer commands 66% faster than the inverse simulation and reaches acceptable precision even on previously unseen trajectories.
Calipso: Physics-based Image and Video Editing through CAD Model Proxies
Aug 12, 2017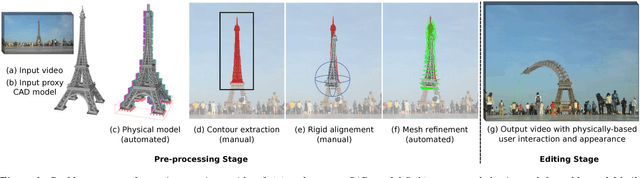
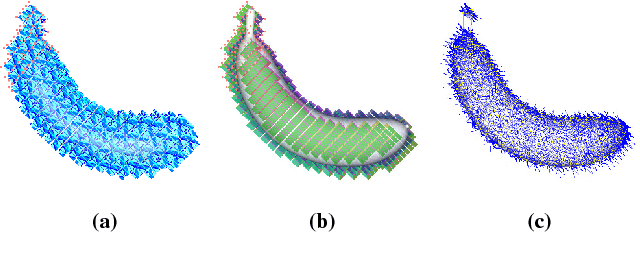
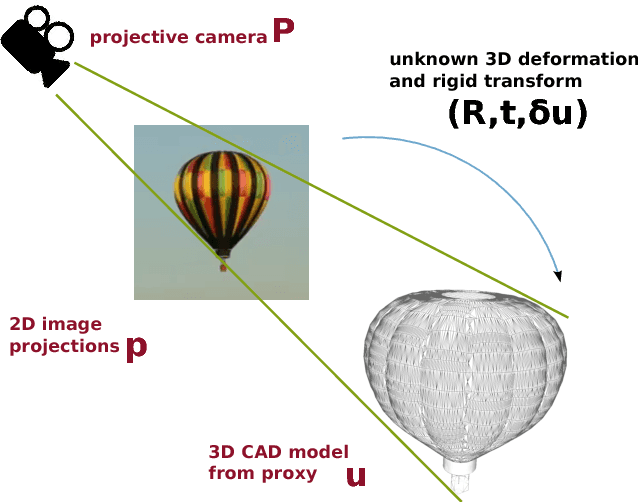
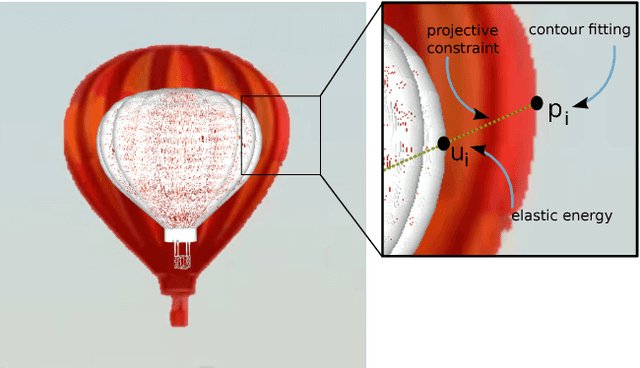
We present Calipso, an interactive method for editing images and videos in a physically-coherent manner. Our main idea is to realize physics-based manipulations by running a full physics simulation on proxy geometries given by non-rigidly aligned CAD models. Running these simulations allows us to apply new, unseen forces to move or deform selected objects, change physical parameters such as mass or elasticity, or even add entire new objects that interact with the rest of the underlying scene. In Calipso, the user makes edits directly in 3D; these edits are processed by the simulation and then transfered to the target 2D content using shape-to-image correspondences in a photo-realistic rendering process. To align the CAD models, we introduce an efficient CAD-to-image alignment procedure that jointly minimizes for rigid and non-rigid alignment while preserving the high-level structure of the input shape. Moreover, the user can choose to exploit image flow to estimate scene motion, producing coherent physical behavior with ambient dynamics. We demonstrate Calipso's physics-based editing on a wide range of examples producing myriad physical behavior while preserving geometric and visual consistency.