 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArtificial Intelligence Enables Real-Time and Intuitive Control of Prostheses via Nerve Interface
Mar 16, 2022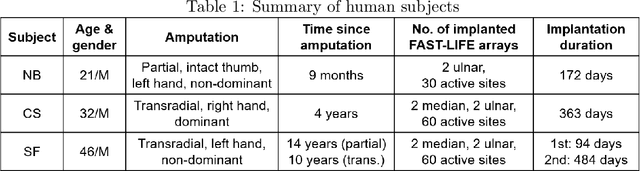
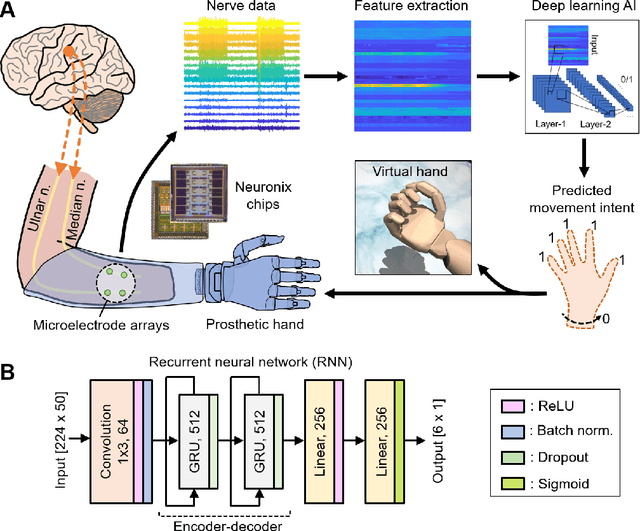


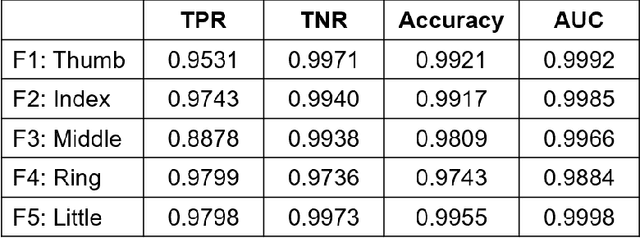
Objective: The next generation prosthetic hand that moves and feels like a real hand requires a robust neural interconnection between the human minds and machines. Methods: Here we present a neuroprosthetic system to demonstrate that principle by employing an artificial intelligence (AI) agent to translate the amputee's movement intent through a peripheral nerve interface. The AI agent is designed based on the recurrent neural network (RNN) and could simultaneously decode six degree-of-freedom (DOF) from multichannel nerve data in real-time. The decoder's performance is characterized in motor decoding experiments with three human amputees. Results: First, we show the AI agent enables amputees to intuitively control a prosthetic hand with individual finger and wrist movements up to 97-98% accuracy. Second, we demonstrate the AI agent's real-time performance by measuring the reaction time and information throughput in a hand gesture matching task. Third, we investigate the AI agent's long-term uses and show the decoder's robust predictive performance over a 16-month implant duration. Conclusion & significance: Our study demonstrates the potential of AI-enabled nerve technology, underling the next generation of dexterous and intuitive prosthetic hands.
A Portable, Self-Contained Neuroprosthetic Hand with Deep Learning-Based Finger Control
Mar 24, 2021

Objective: Deep learning-based neural decoders have emerged as the prominent approach to enable dexterous and intuitive control of neuroprosthetic hands. Yet few studies have materialized the use of deep learning in clinical settings due to its high computational requirements. Methods: Recent advancements of edge computing devices bring the potential to alleviate this problem. Here we present the implementation of a neuroprosthetic hand with embedded deep learning-based control. The neural decoder is designed based on the recurrent neural network (RNN) architecture and deployed on the NVIDIA Jetson Nano - a compacted yet powerful edge computing platform for deep learning inference. This enables the implementation of the neuroprosthetic hand as a portable and self-contained unit with real-time control of individual finger movements. Results: The proposed system is evaluated on a transradial amputee using peripheral nerve signals (ENG) with implanted intrafascicular microelectrodes. The experiment results demonstrate the system's capabilities of providing robust, high-accuracy (95-99%) and low-latency (50-120 msec) control of individual finger movements in various laboratory and real-world environments. Conclusion: Modern edge computing platforms enable the effective use of deep learning-based neural decoders for neuroprosthesis control as an autonomous system. Significance: This work helps pioneer the deployment of deep neural networks in clinical applications underlying a new class of wearable biomedical devices with embedded artificial intelligence.