 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCautious Bayesian Optimization for Efficient and Scalable Policy Search
Nov 18, 2020



Sample efficiency is one of the key factors when applying policy search to real-world problems. In recent years, Bayesian Optimization (BO) has become prominent in the field of robotics due to its sample efficiency and little prior knowledge needed. However, one drawback of BO is its poor performance on high-dimensional search spaces as it focuses on global search. In the policy search setting, local optimization is typically sufficient as initial policies are often available, e.g., via meta-learning, kinesthetic demonstrations or sim-to-real approaches. In this paper, we propose to constrain the policy search space to a sublevel-set of the Bayesian surrogate model's predictive uncertainty. This simple yet effective way of constraining the policy update enables BO to scale to high-dimensional spaces (>100) as well as reduces the risk of damaging the system. We demonstrate the effectiveness of our approach on a wide range of problems, including a motor skills task, adapting deep RL agents to new reward signals and a sim-to-real task for an inverted pendulum system.
Noisy-Input Entropy Search for Efficient Robust Bayesian Optimization
Feb 07, 2020
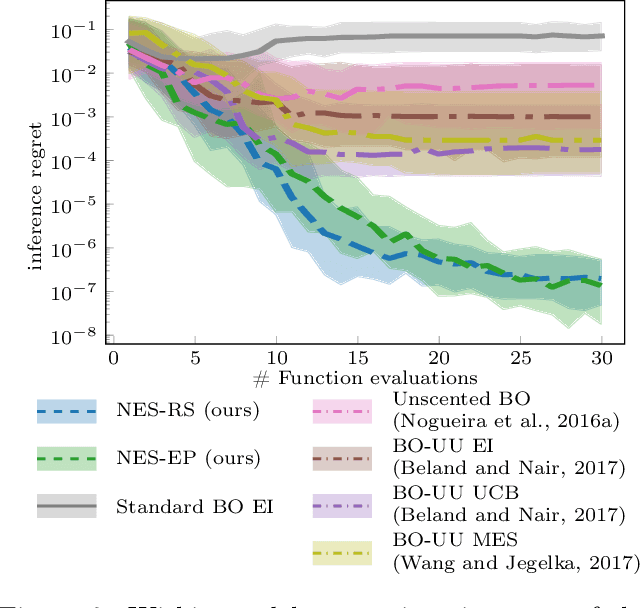
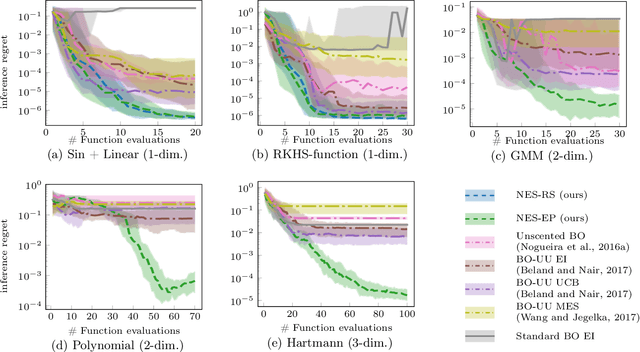
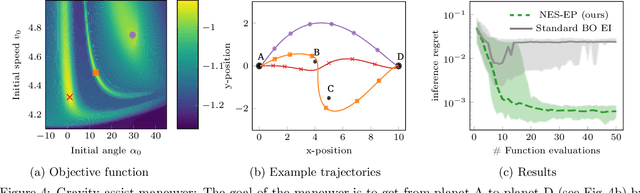
We consider the problem of robust optimization within the well-established Bayesian optimization (BO) framework. While BO is intrinsically robust to noisy evaluations of the objective function, standard approaches do not consider the case of uncertainty about the input parameters. In this paper, we propose Noisy-Input Entropy Search (NES), a novel information-theoretic acquisition function that is designed to find robust optima for problems with both input and measurement noise. NES is based on the key insight that the robust objective in many cases can be modeled as a Gaussian process, however, it cannot be observed directly. We evaluate NES on several benchmark problems from the optimization literature and from engineering. The results show that NES reliably finds robust optima, outperforming existing methods from the literature on all benchmarks.
Bayesian Optimization for Policy Search in High-Dimensional Systems via Automatic Domain Selection
Jan 21, 2020


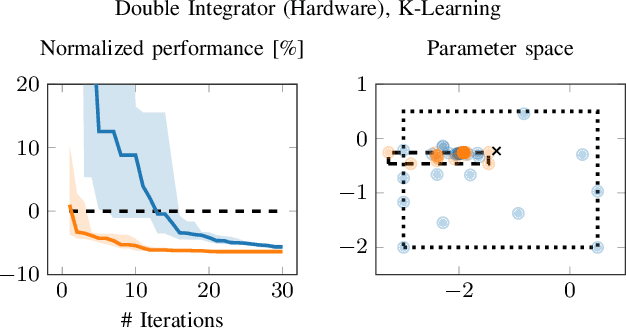
Bayesian Optimization (BO) is an effective method for optimizing expensive-to-evaluate black-box functions with a wide range of applications for example in robotics, system design and parameter optimization. However, scaling BO to problems with large input dimensions (>10) remains an open challenge. In this paper, we propose to leverage results from optimal control to scale BO to higher dimensional control tasks and to reduce the need for manually selecting the optimization domain. The contributions of this paper are twofold: 1) We show how we can make use of a learned dynamics model in combination with a model-based controller to simplify the BO problem by focusing onto the most relevant regions of the optimization domain. 2) Based on (1) we present a method to find an embedding in parameter space that reduces the effective dimensionality of the optimization problem. To evaluate the effectiveness of the proposed approach, we present an experimental evaluation on real hardware, as well as simulated tasks including a 48-dimensional policy for a quadcopter.
Dual Control for Approximate Bayesian Reinforcement Learning
Aug 11, 2016


Control of non-episodic, finite-horizon dynamical systems with uncertain dynamics poses a tough and elementary case of the exploration-exploitation trade-off. Bayesian reinforcement learning, reasoning about the effect of actions and future observations, offers a principled solution, but is intractable. We review, then extend an old approximate approach from control theory---where the problem is known as dual control---in the context of modern regression methods, specifically generalized linear regression. Experiments on simulated systems show that this framework offers a useful approximation to the intractable aspects of Bayesian RL, producing structured exploration strategies that differ from standard RL approaches. We provide simple examples for the use of this framework in (approximate) Gaussian process regression and feedforward neural networks for the control of exploration.