 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Reconfigurable V-shape Formation of Multiple UAVs in Narrow Space Environments
Feb 13, 2024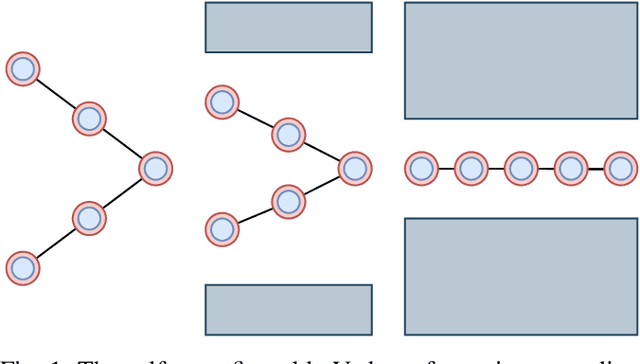
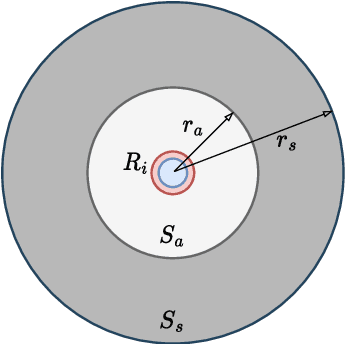
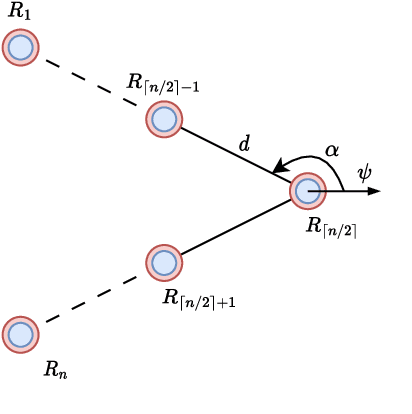
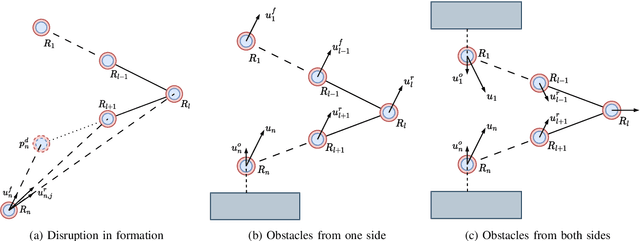
This paper presents the design and implementation of a self-reconfigurable V-shape formation controller for multiple unmanned aerial vehicles (UAVs) navigating through narrow spaces in a dense obstacle environment. The selection of the V-shape formation is motivated by its maneuverability and visibility advantages. The main objective is to develop an effective formation control strategy that allows UAVs to autonomously adjust their positions to form the desired formation while navigating through obstacles. To achieve this, we propose a distributed behavior-based control algorithm that combines the behaviors designed for individual UAVs so that they together navigate the UAVs to their desired positions. The reconfiguration process is automatic, utilizing individual UAV sensing within the formation, allowing for dynamic adaptations such as opening/closing wings or merging into a straight line. Simulation results show that the self-reconfigurable V-shape formation offers adaptability and effectiveness for UAV formations in complex operational scenarios.
Ant Colony Optimization for Cooperative Inspection Path Planning Using Multiple Unmanned Aerial Vehicles
Feb 13, 2024This paper presents a new swarm intelligence-based approach to deal with the cooperative path planning problem of unmanned aerial vehicles (UAVs), which is essential for the automatic inspection of infrastructure. The approach uses a 3D model of the structure to generate viewpoints for the UAVs. The calculation of the viewpoints considers the constraints related to the UAV formation model, camera parameters, and requirements for data post-processing. The viewpoints are then used as input to formulate the path planning as an extended traveling salesman problem and the definition of a new cost function. Ant colony optimization is finally used to solve the problem to yield optimal inspection paths. Experiments with 3D models of real structures have been conducted to evaluate the performance of the proposed approach. The results show that our system is not only capable of generating feasible inspection paths for UAVs but also reducing the path length by 29.47\% for complex structures when compared with another heuristic approach. The source code of the algorithm can be found at https://github.com/duynamrcv/aco_3d_ipp.
Development of a Vision System to Enhance the Reliability of the Pick-and-Place Robot for Autonomous Testing of Camera Module used in Smartphones
May 08, 2023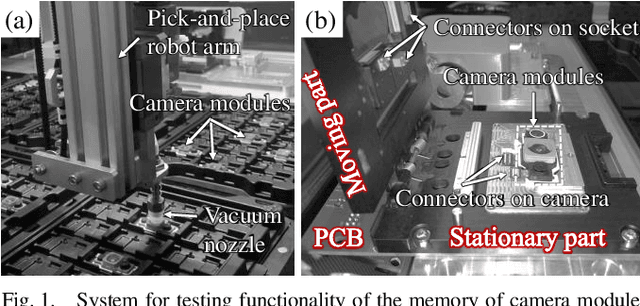
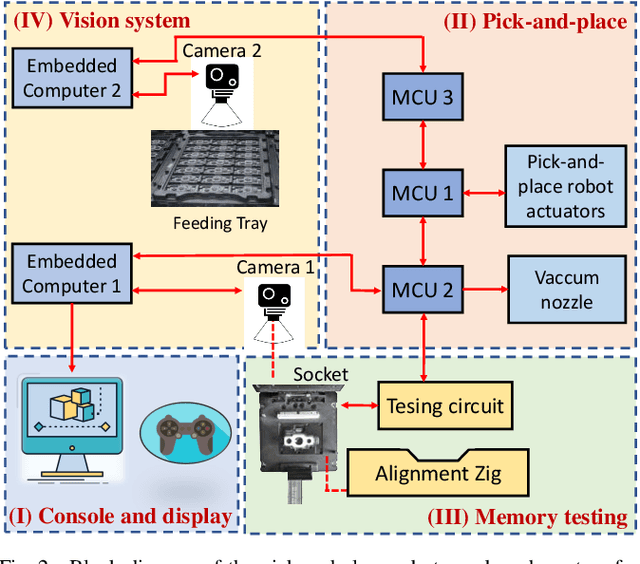
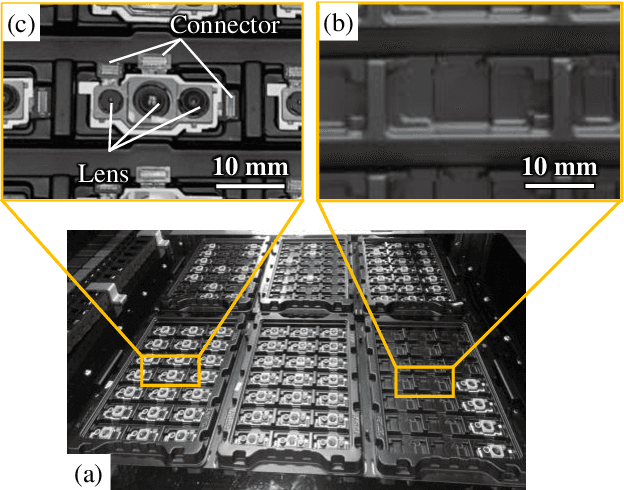
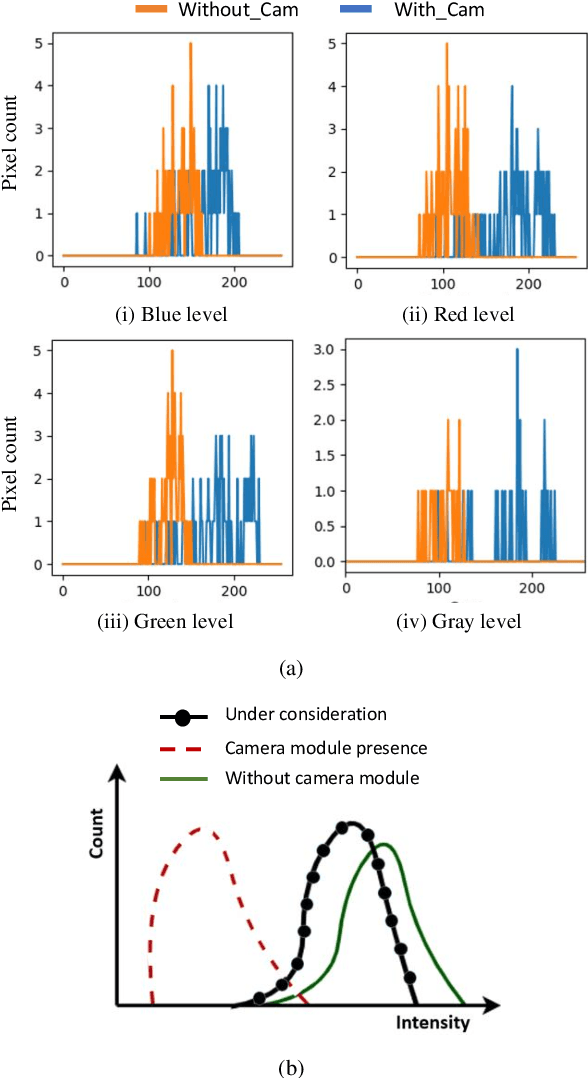
Pick-and-place robots are commonly used in modern industrial manufacturing. For complex devices/parts like camera modules used in smartphones, which contain optical parts, electrical components and interfacing connectors, the placement operation may not absolutely accurate, which may cause damage in the device under test during the mechanical movement to make good contact for electrical functions inspection. In this paper, we proposed an effective vision system including hardware and algorithm to enhance the reliability of the pick-and-place robot for autonomous testing memory of camera modules. With limited hardware based on camera and raspberry PI and using simplify image processing algorithm based on histogram information, the vision system can confirm the presence of the camera modules in feeding tray and the placement accuracy of the camera module in test socket. Through that, the system can work with more flexibility and avoid damaging the device under test. The system was experimentally quantified through testing approximately 2000 camera modules in a stable light condition. Experimental results demonstrate that the system achieves accuracy of more than 99.92%. With its simplicity and effectiveness, the proposed vision system can be considered as a useful solution for using in pick-and-place systems in industry.
Deployment of UAVs for Optimal Multihop Ad-hoc Networks Using Particle Swarm Optimization and Behavior-based Control
Dec 26, 2022This study proposes an approach for establishing an optimal multihop ad-hoc network using multiple unmanned aerial vehicles (UAVs) to provide emergency communication in disaster areas. The approach includes two stages, one uses particle swarm optimization (PSO) to find optimal positions to deploy UAVs, and the other uses a behavior-based controller to navigate the UAVs to their assigned positions without colliding with obstacles in an unknown environment. Several constraints related to the UAVs' sensing and communication ranges have been imposed to ensure the applicability of the proposed approach in real-world scenarios. A number of simulation experiments with data loaded from real environments have been conducted. The results show that our proposed approach is not only successful in establishing multihop ad-hoc routes but also meets the requirements for real-time deployment of UAVs.