 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent-based Reconfiguration Control for Time-varying Formation of Robot Swarms in Narrow Spaces
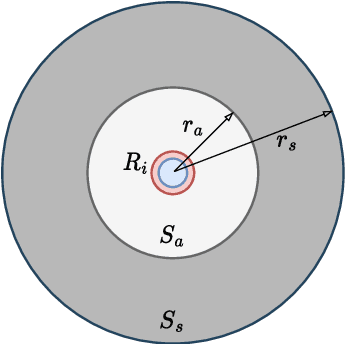
May 22, 2025This study proposes an event-based reconfiguration control to navigate a robot swarm through challenging environments with narrow passages such as valleys, tunnels, and corridors. The robot swarm is modeled as an undirected graph, where each node represents a robot capable of collecting real-time data on the environment and the states of other robots in the formation. This data serves as the input for the controller to provide dynamic adjustments between the desired and straight-line configurations. The controller incorporates a set of behaviors, designed using artificial potential fields, to meet the requirements of goal-oriented motion, formation maintenance, tailgating, and collision avoidance. The stability of the formation control is guaranteed via the Lyapunov theorem. Simulation and comparison results show that the proposed controller not only successfully navigates the robot swarm through narrow spaces but also outperforms other established methods in key metrics including the success rate, heading order, speed, travel time, and energy efficiency. Software-in-the-loop tests have also been conducted to validate the controller's applicability in practical scenarios. The source code of the controller is available at https://github.com/duynamrcv/erc.
Self-Reconfigurable V-shape Formation of Multiple UAVs in Narrow Space Environments
Feb 13, 2024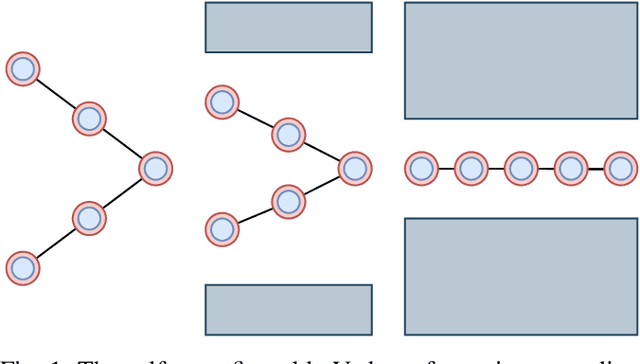
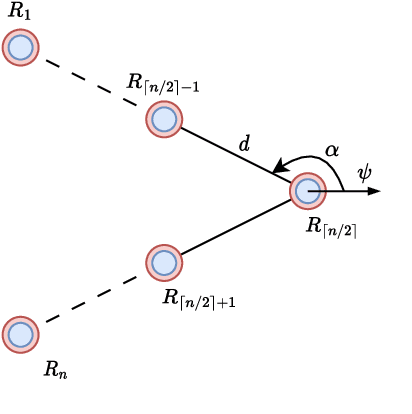
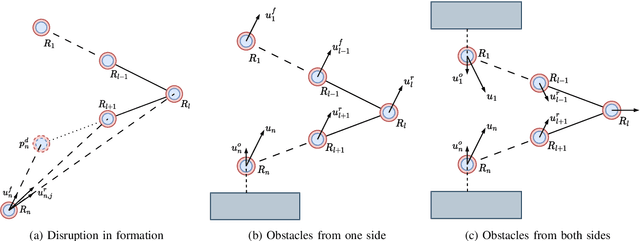
This paper presents the design and implementation of a self-reconfigurable V-shape formation controller for multiple unmanned aerial vehicles (UAVs) navigating through narrow spaces in a dense obstacle environment. The selection of the V-shape formation is motivated by its maneuverability and visibility advantages. The main objective is to develop an effective formation control strategy that allows UAVs to autonomously adjust their positions to form the desired formation while navigating through obstacles. To achieve this, we propose a distributed behavior-based control algorithm that combines the behaviors designed for individual UAVs so that they together navigate the UAVs to their desired positions. The reconfiguration process is automatic, utilizing individual UAV sensing within the formation, allowing for dynamic adaptations such as opening/closing wings or merging into a straight line. Simulation results show that the self-reconfigurable V-shape formation offers adaptability and effectiveness for UAV formations in complex operational scenarios.
Deployment of UAVs for Optimal Multihop Ad-hoc Networks Using Particle Swarm Optimization and Behavior-based Control
Dec 26, 2022This study proposes an approach for establishing an optimal multihop ad-hoc network using multiple unmanned aerial vehicles (UAVs) to provide emergency communication in disaster areas. The approach includes two stages, one uses particle swarm optimization (PSO) to find optimal positions to deploy UAVs, and the other uses a behavior-based controller to navigate the UAVs to their assigned positions without colliding with obstacles in an unknown environment. Several constraints related to the UAVs' sensing and communication ranges have been imposed to ensure the applicability of the proposed approach in real-world scenarios. A number of simulation experiments with data loaded from real environments have been conducted. The results show that our proposed approach is not only successful in establishing multihop ad-hoc routes but also meets the requirements for real-time deployment of UAVs.