 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvent-based Reconfiguration Control for Time-varying Formation of Robot Swarms in Narrow Spaces
May 22, 2025This study proposes an event-based reconfiguration control to navigate a robot swarm through challenging environments with narrow passages such as valleys, tunnels, and corridors. The robot swarm is modeled as an undirected graph, where each node represents a robot capable of collecting real-time data on the environment and the states of other robots in the formation. This data serves as the input for the controller to provide dynamic adjustments between the desired and straight-line configurations. The controller incorporates a set of behaviors, designed using artificial potential fields, to meet the requirements of goal-oriented motion, formation maintenance, tailgating, and collision avoidance. The stability of the formation control is guaranteed via the Lyapunov theorem. Simulation and comparison results show that the proposed controller not only successfully navigates the robot swarm through narrow spaces but also outperforms other established methods in key metrics including the success rate, heading order, speed, travel time, and energy efficiency. Software-in-the-loop tests have also been conducted to validate the controller's applicability in practical scenarios. The source code of the controller is available at https://github.com/duynamrcv/erc.
Multi-goal Rapidly Exploring Random Tree with Safety and Dynamic Constraints for UAV Cooperative Path Planning
Apr 16, 2025Cooperative path planning is gaining its importance due to the increasing demand on using multiple unmanned aerial vehicles (UAVs) for complex missions. This work addresses the problem by introducing a new algorithm named MultiRRT that extends the rapidly exploring random tree (RRT) to generate paths for a group of UAVs to reach multiple goal locations at the same time. We first derive the dynamics constraint of the UAV and include it in the problem formulation. MultiRRT is then developed, taking into account the cooperative requirements and safe constraints during its path-searching process. The algorithm features two new mechanisms, node reduction and Bezier interpolation, to ensure the feasibility and optimality of the paths generated. Importantly, the interpolated paths are proven to meet the safety and dynamics constraints imposed by obstacles and the UAVs. A number of simulations, comparisons, and experiments have been conducted to evaluate the performance of the proposed approach. The results show that MultiRRT can generate collision-free paths for multiple UAVs to reach their goals with better scores in path length and smoothness metrics than state-of-the-art RRT variants including Theta-RRT, FN-RRT, RRT*, and RRT*-Smart. The generated paths are also tested in practical flights with real UAVs to evaluate their validity for cooperative tasks. The source code of the algorithm is available at https://github.com/duynamrcv/multi-target_RRT
Navigation Variable-based Multi-objective Particle Swarm Optimization for UAV Path Planning with Kinematic Constraints
Jan 03, 2025Path planning is essential for unmanned aerial vehicles (UAVs) as it determines the path that the UAV needs to follow to complete a task. This work addresses this problem by introducing a new algorithm called navigation variable-based multi-objective particle swarm optimization (NMOPSO). It first models path planning as an optimization problem via the definition of a set of objective functions that include optimality and safety requirements for UAV operation. The NMOPSO is then used to minimize those functions through Pareto optimal solutions. The algorithm features a new path representation based on navigation variables to include kinematic constraints and exploit the maneuverable characteristics of the UAV. It also includes an adaptive mutation mechanism to enhance the diversity of the swarm for better solutions. Comparisons with various algorithms have been carried out to benchmark the proposed approach. The results indicate that the NMOPSO performs better than not only other particle swarm optimization variants but also other state-of-the-art multi-objective and metaheuristic optimization algorithms. Experiments have also been conducted with real UAVs to confirm the validity of the approach for practical flights. The source code of the algorithm is available at https://github.com/ngandng/NMOPSO.
Model Predictive Control for Optimal Motion Planning of Unmanned Aerial Vehicles
Oct 13, 2024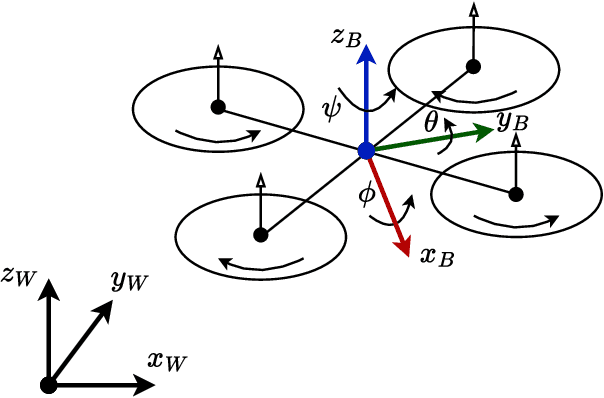
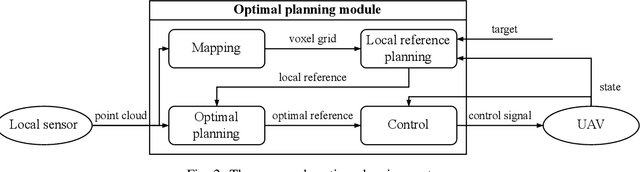
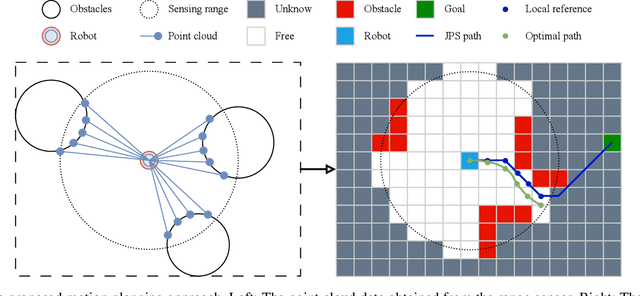
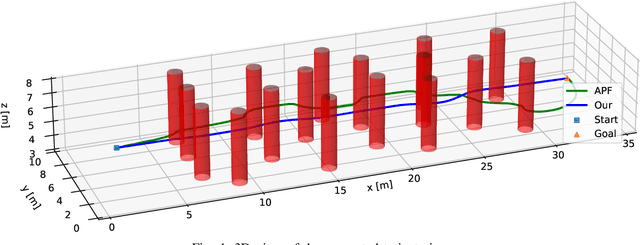
Motion planning is an essential process for the navigation of unmanned aerial vehicles (UAVs) where they need to adapt to obstacles and different structures of their operating environment to reach the goal. This paper presents an optimal motion planner for UAVs operating in unknown complex environments. The motion planner receives point cloud data from a local range sensor and then converts it into a voxel grid representing the surrounding environment. A local trajectory guiding the UAV to the goal is then generated based on the voxel grid. This trajectory is further optimized using model predictive control (MPC) to enhance the safety, speed, and smoothness of UAV operation. The optimization is carried out via the definition of several cost functions and constraints, taking into account the UAV's dynamics and requirements. A number of simulations and comparisons with a state-of-the-art method have been conducted in a complex environment with many obstacles to evaluate the performance of our method. The results show that our method provides not only shorter and smoother trajectories but also faster and more stable speed profiles. It is also energy efficient making it suitable for various UAV applications.
Radial Basis Function Neural Networks for Formation Control of Unmanned Aerial Vehicles
Apr 21, 2024This paper addresses the problem of controlling multiple unmanned aerial vehicles (UAVs) cooperating in a formation to carry out a complex task such as surface inspection. We first use the virtual leader-follower model to determine the topology and trajectory of the formation. A double-loop control system combining backstepping and sliding mode control techniques is then designed for the UAVs to track the trajectory. A radial basis function neural network (RBFNN) capable of estimating external disturbances is developed to enhance the robustness of the controller. The stability of the controller is proven by using the Lyapunov theorem. A number of comparisons and software-in-the-loop (SIL) tests have been conducted to evaluate the performance of the proposed controller. The results show that our controller not only outperforms other state-of-the-art controllers but is also sufficient for complex tasks of UAVs such as collecting surface data for inspection. The source code of our controller can be found at https://github.com/duynamrcv/rbf_bsmc