 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOMR: Occlusion-Aware Memory-Based Refinement for Video Lane Detection
Aug 14, 2024
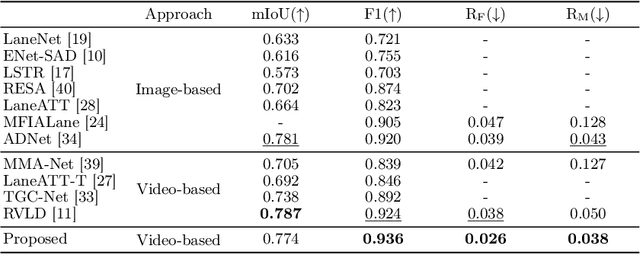
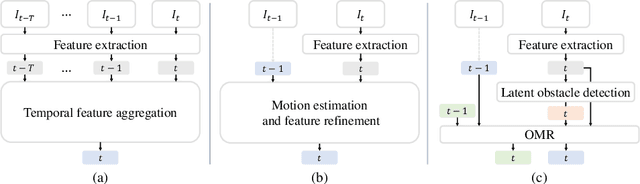

A novel algorithm for video lane detection is proposed in this paper. First, we extract a feature map for a current frame and detect a latent mask for obstacles occluding lanes. Then, we enhance the feature map by developing an occlusion-aware memory-based refinement (OMR) module. It takes the obstacle mask and feature map from the current frame, previous output, and memory information as input, and processes them recursively in a video. Moreover, we apply a novel data augmentation scheme for training the OMR module effectively. Experimental results show that the proposed algorithm outperforms existing techniques on video lane datasets. Our codes are available at https://github.com/dongkwonjin/OMR.
Semantic Line Combination Detector
May 01, 2024A novel algorithm, called semantic line combination detector (SLCD), to find an optimal combination of semantic lines is proposed in this paper. It processes all lines in each line combination at once to assess the overall harmony of the lines. First, we generate various line combinations from reliable lines. Second, we estimate the score of each line combination and determine the best one. Experimental results demonstrate that the proposed SLCD outperforms existing semantic line detectors on various datasets. Moreover, it is shown that SLCD can be applied effectively to three vision tasks of vanishing point detection, symmetry axis detection, and composition-based image retrieval. Our codes are available at https://github.com/Jinwon-Ko/SLCD.
Recursive Video Lane Detection
Aug 22, 2023A novel algorithm to detect road lanes in videos, called recursive video lane detector (RVLD), is proposed in this paper, which propagates the state of a current frame recursively to the next frame. RVLD consists of an intra-frame lane detector (ILD) and a predictive lane detector (PLD). First, we design ILD to localize lanes in a still frame. Second, we develop PLD to exploit the information of the previous frame for lane detection in a current frame. To this end, we estimate a motion field and warp the previous output to the current frame. Using the warped information, we refine the feature map of the current frame to detect lanes more reliably. Experimental results show that RVLD outperforms existing detectors on video lane datasets. Our codes are available at https://github.com/dongkwonjin/RVLD.
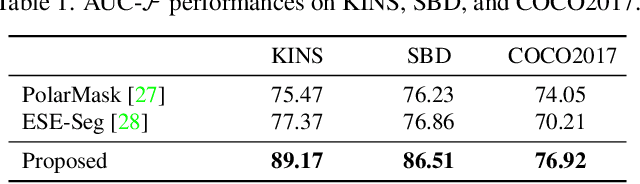
Applying Eigencontours to PolarMask-Based Instance Segmentation
Aug 24, 2022
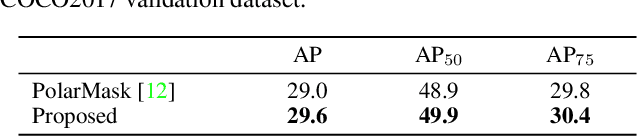
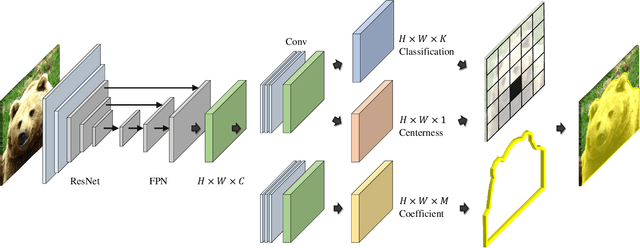
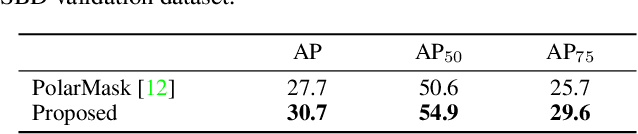
Eigencontours are the first data-driven contour descriptors based on singular value decomposition. Based on the implementation of ESE-Seg, eigencontours were applied to the instance segmentation task successfully. In this report, we incorporate eigencontours into the PolarMask network for instance segmentation. Experimental results demonstrate that the proposed algorithm yields better results than PolarMask on two instance segmentation datasets of COCO2017 and SBD. Also, we analyze the characteristics of eigencontours qualitatively. Our codes are available at https://github.com/dnjs3594/Eigencontours.
Eigenlanes: Data-Driven Lane Descriptors for Structurally Diverse Lanes
Mar 29, 2022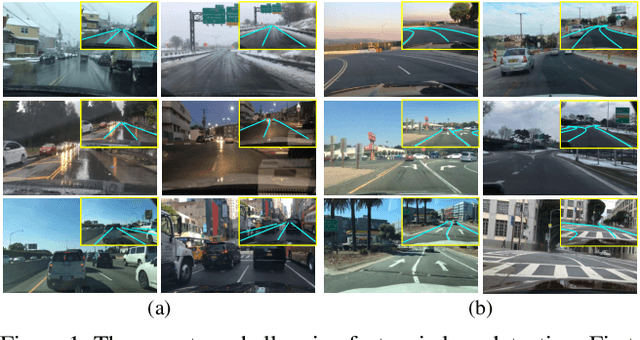

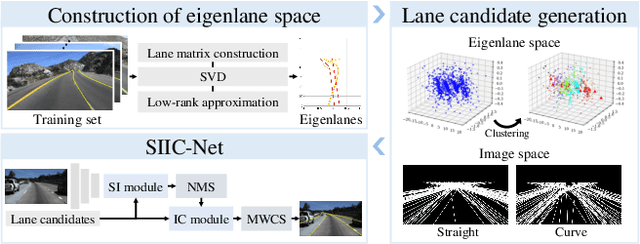
A novel algorithm to detect road lanes in the eigenlane space is proposed in this paper. First, we introduce the notion of eigenlanes, which are data-driven descriptors for structurally diverse lanes, including curved, as well as straight, lanes. To obtain eigenlanes, we perform the best rank-M approximation of a lane matrix containing all lanes in a training set. Second, we generate a set of lane candidates by clustering the training lanes in the eigenlane space. Third, using the lane candidates, we determine an optimal set of lanes by developing an anchor-based detection network, called SIIC-Net. Experimental results demonstrate that the proposed algorithm provides excellent detection performance for structurally diverse lanes. Our codes are available at https://github.com/dongkwonjin/Eigenlanes.
Semantic Line Detection Using Mirror Attention and Comparative Ranking and Matching
Mar 29, 2022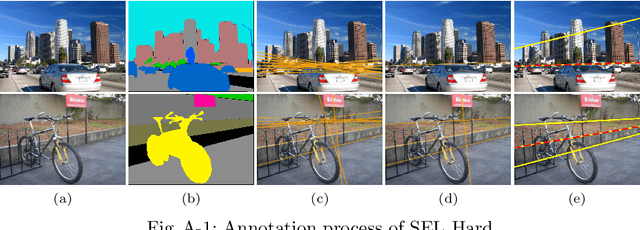
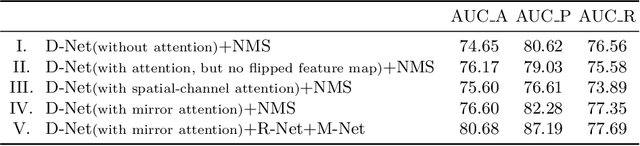
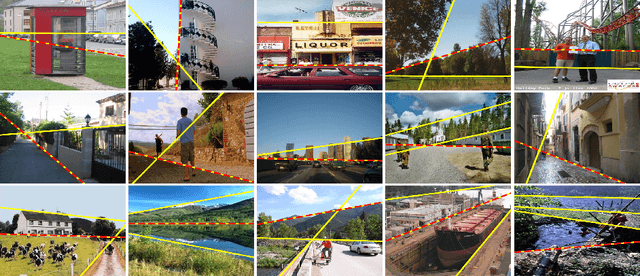
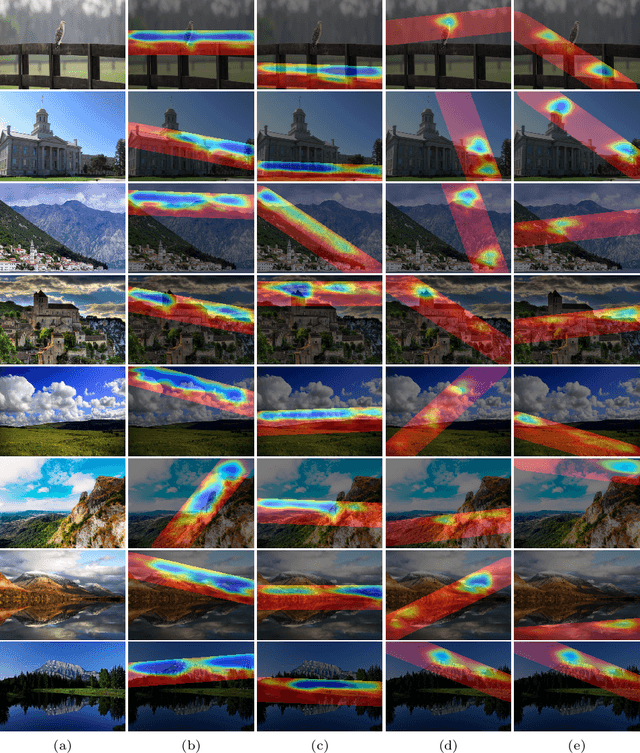
A novel algorithm to detect semantic lines is proposed in this paper. We develop three networks: detection network with mirror attention (D-Net) and comparative ranking and matching networks (R-Net and M-Net). D-Net extracts semantic lines by exploiting rich contextual information. To this end, we design the mirror attention module. Then, through pairwise comparisons of extracted semantic lines, we iteratively select the most semantic line and remove redundant ones overlapping with the selected one. For the pairwise comparisons, we develop R-Net and M-Net in the Siamese architecture. Experiments demonstrate that the proposed algorithm outperforms the conventional semantic line detector significantly. Moreover, we apply the proposed algorithm to detect two important kinds of semantic lines successfully: dominant parallel lines and reflection symmetry axes. Our codes are available at https://github.com/dongkwonjin/Semantic-Line-DRM.
Eigencontours: Novel Contour Descriptors Based on Low-Rank Approximation
Mar 29, 2022
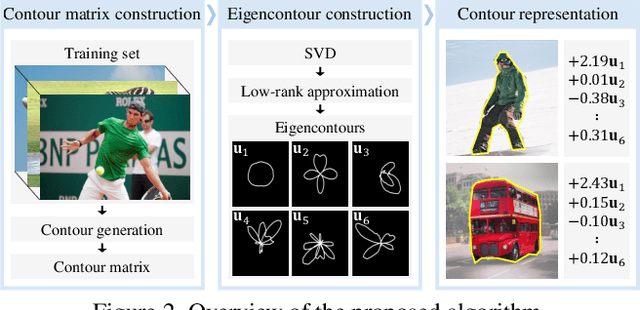
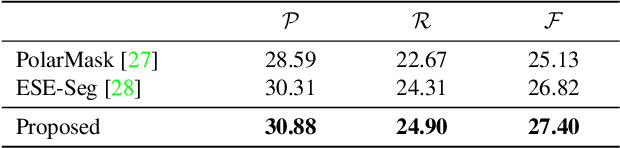
Novel contour descriptors, called eigencontours, based on low-rank approximation are proposed in this paper. First, we construct a contour matrix containing all object boundaries in a training set. Second, we decompose the contour matrix into eigencontours via the best rank-M approximation. Third, we represent an object boundary by a linear combination of the M eigencontours. We also incorporate the eigencontours into an instance segmentation framework. Experimental results demonstrate that the proposed eigencontours can represent object boundaries more effectively and more efficiently than existing descriptors in a low-dimensional space. Furthermore, the proposed algorithm yields meaningful performances on instance segmentation datasets.
Harmonious Semantic Line Detection via Maximal Weight Clique Selection
Apr 14, 2021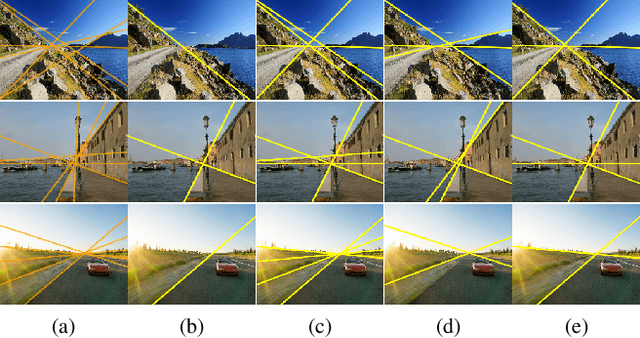

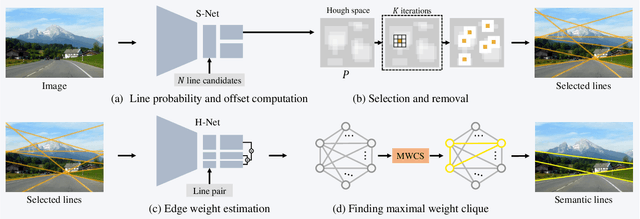

A novel algorithm to detect an optimal set of semantic lines is proposed in this work. We develop two networks: selection network (S-Net) and harmonization network (H-Net). First, S-Net computes the probabilities and offsets of line candidates. Second, we filter out irrelevant lines through a selection-and-removal process. Third, we construct a complete graph, whose edge weights are computed by H-Net. Finally, we determine a maximal weight clique representing an optimal set of semantic lines. Moreover, to assess the overall harmony of detected lines, we propose a novel metric, called HIoU. Experimental results demonstrate that the proposed algorithm can detect harmonious semantic lines effectively and efficiently. Our codes are available at https://github.com/dongkwonjin/Semantic-Line-MWCS.