 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Coordination with the System-Level Shared State: An Embodied-AI Native Modular Framework
Jan 20, 2026As Embodied AI systems move from research prototypes to real world deployments, they tend to evolve rapidly while remaining reliable under workload changes and partial failures. In practice, many deployments are only partially decoupled: middleware moves messages, but shared context and feedback semantics are implicit, causing interface drift, cross-module interference, and brittle recovery at scale. We present ANCHOR, a modular framework that makes decoupling and robustness explicit system-level primitives. ANCHOR separates (i) Canonical Records, an evolvable contract for the standardized shared state, from (ii) a communication bus for many-to-many dissemination and feedback-oriented coordination, forming an inspectable end-to-end loop. We validate closed-loop feasibility on a de-identified workflow instantiation, characterize latency distributions under varying payload sizes and publish rates, and demonstrate automatic stream resumption after hard crashes and restarts even with shared-memory loss. Overall, ANCHOR turns ad-hoc integration glue into explicit contracts, enabling controlled degradation under load and self-healing recovery for scalable deployment of closed-loop AI systems.
GenTe: Generative Real-world Terrains for General Legged Robot Locomotion Control
Apr 14, 2025Developing bipedal robots capable of traversing diverse real-world terrains presents a fundamental robotics challenge, as existing methods using predefined height maps and static environments fail to address the complexity of unstructured landscapes. To bridge this gap, we propose GenTe, a framework for generating physically realistic and adaptable terrains to train generalizable locomotion policies. GenTe constructs an atomic terrain library that includes both geometric and physical terrains, enabling curriculum training for reinforcement learning-based locomotion policies. By leveraging function-calling techniques and reasoning capabilities of Vision-Language Models (VLMs), GenTe generates complex, contextually relevant terrains from textual and graphical inputs. The framework introduces realistic force modeling for terrain interactions, capturing effects such as soil sinkage and hydrodynamic resistance. To the best of our knowledge, GenTe is the first framework that systemically generates simulation environments for legged robot locomotion control. Additionally, we introduce a benchmark of 100 generated terrains. Experiments demonstrate improved generalization and robustness in bipedal robot locomotion.
EmbodiedAgent: A Scalable Hierarchical Approach to Overcome Practical Challenge in Multi-Robot Control
Apr 14, 2025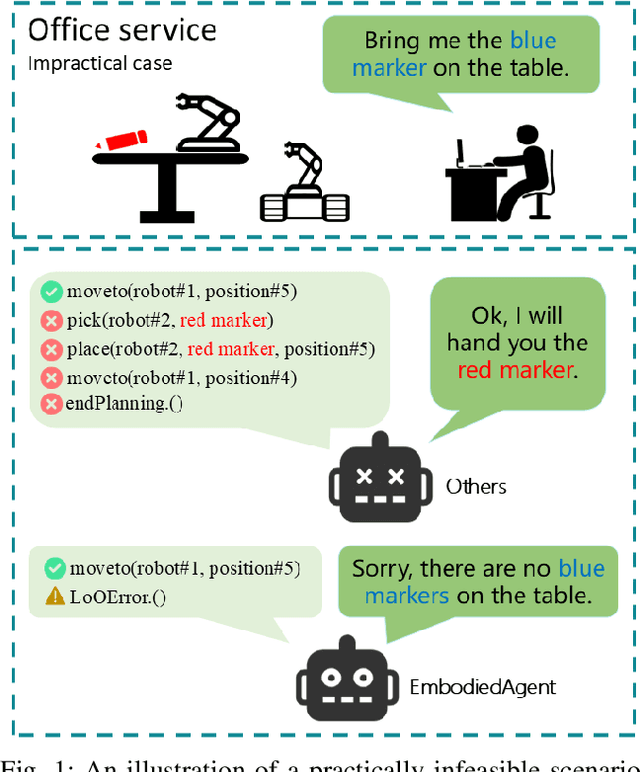



This paper introduces EmbodiedAgent, a hierarchical framework for heterogeneous multi-robot control. EmbodiedAgent addresses critical limitations of hallucination in impractical tasks. Our approach integrates a next-action prediction paradigm with a structured memory system to decompose tasks into executable robot skills while dynamically validating actions against environmental constraints. We present MultiPlan+, a dataset of more than 18,000 annotated planning instances spanning 100 scenarios, including a subset of impractical cases to mitigate hallucination. To evaluate performance, we propose the Robot Planning Assessment Schema (RPAS), combining automated metrics with LLM-aided expert grading. Experiments demonstrate EmbodiedAgent's superiority over state-of-the-art models, achieving 71.85% RPAS score. Real-world validation in an office service task highlights its ability to coordinate heterogeneous robots for long-horizon objectives.