 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOD-DEAL: Dynamic Expert-Guided Adversarial Learning with Online Decomposition for Scalable Capacitated Vehicle Routing
Feb 03, 2026Solving large-scale capacitated vehicle routing problems (CVRP) is hindered by the high complexity of heuristics and the limited generalization of neural solvers on massive graphs. We propose OD-DEAL, an adversarial learning framework that tightly integrates hybrid genetic search (HGS) and online barycenter clustering (BCC) decomposition, and leverages high-fidelity knowledge distillation to transfer expert heuristic behavior. OD-DEAL trains a graph attention network (GAT)-based generative policy through a minimax game, in which divide-and-conquer strategies from a hybrid expert are distilled into dense surrogate rewards. This enables high-quality, clustering-free inference on large-scale instances. Empirical results demonstrate that OD-DEAL achieves state-of-the-art (SOTA) real-time CVRP performance, solving 10000-node instances with near-constant neural scaling. This uniquely enables the sub-second, heuristic-quality inference required for dynamic large-scale deployment.
A UAV-Enabled Time-Sensitive Data Collection Scheme for Grassland Monitoring Edge Networks
Jul 30, 2024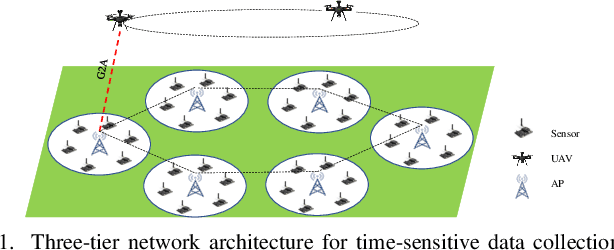
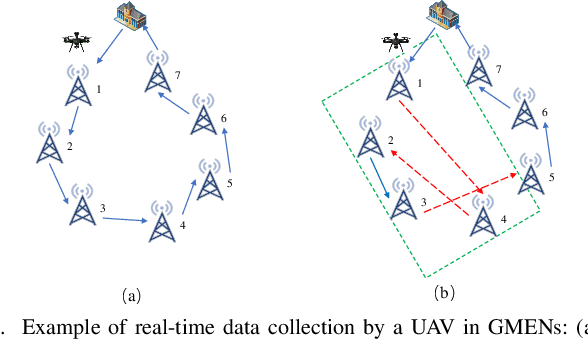
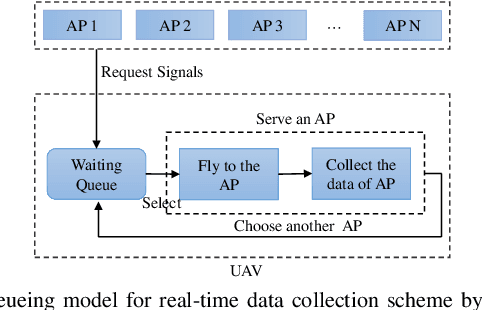
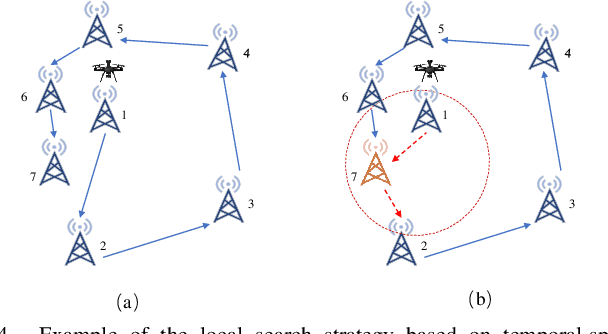
Grassland monitoring is essential for the sustainable development of grassland resources. Traditional Internet of Things (IoT) devices generate critical ecological data, making data loss unacceptable, but the harsh environment complicates data collection. Unmanned Aerial Vehicle (UAV) and mobile edge computing (MEC) offer efficient data collection solutions, enhancing performance on resource-limited mobile devices. In this context, this paper is the first to investigate a UAV-enabled time-sensitive data collection problem (TSDCMP) within grassland monitoring edge networks (GMENs). Unlike many existing data collection scenarios, this problem has three key challenges. First, the total amount of data collected depends significantly on the data collection duration and arrival time of UAV at each access point (AP). Second, the volume of data at different APs varies among regions due to differences in monitoring objects and vegetation coverage. Third, the service requests time and locations from APs are often not adjacent topologically. To address these issues, We formulate the TSDCMP for UAV-enabled GMENs as a mixed-integer programming model in a single trip. This model considers constraints such as the limited energy of UAV, the coupled routing and time scheduling, and the state of APs and UAV arrival time. Subsequently, we propose a novel cooperative heuristic algorithm based on temporal-spatial correlations (CHTSC) that integrates a modified dynamic programming (MDP) into an iterated local search to solve the TSDCMP for UAV-enabled GMENs. This approach fully takes into account the temporal and spatial relationships between consecutive service requests from APs. Systematic simulation studies demonstrate that the mixed-integer programming model effectively represents the TSDCMP within UAV-enabled GMENs.