 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDrone-based Volume Estimation in Indoor Environments
Nov 15, 2022



Volume estimation in large indoor spaces is an important challenge in robotic inspection of industrial warehouses. We propose an approach for volume estimation for autonomous systems using visual features for indoor localization and surface reconstruction from 2D-LiDAR measurements. A Gaussian Process-based model incorporates information collected from measurements given statistical prior information about the terrain, from which the volume estimate is computed. Our algorithm finds feasible trajectories which minimize the uncertainty of the volume estimate. We show results in simulation for the surface reconstruction and volume estimate of topographic data.
Stability and Robustness of Distributed Suboptimal Model Predictive Control
Nov 14, 2022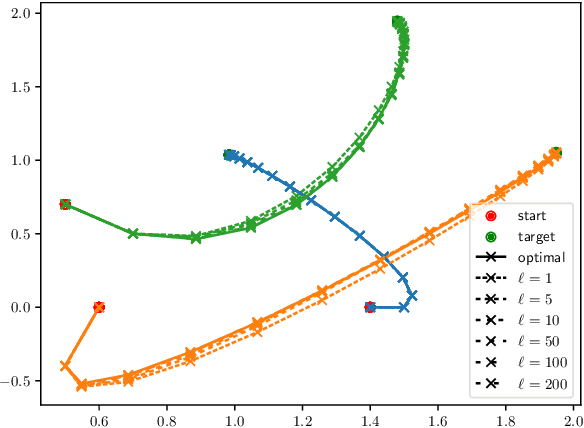
In distributed model predictive control (MPC), the control input at each sampling time is computed by solving a large-scale optimal control problem (OCP) over a finite horizon using distributed algorithms. Typically, such algorithms require several (virtually, infinite) communication rounds between the subsystems to converge, which is a major drawback both computationally and from an energetic perspective (for wireless systems). Motivated by these challenges, we propose a suboptimal distributed MPC scheme in which the total communication burden is distributed also in time, by maintaining a running solution estimate for the large-scale OCP and updating it at each sampling time. We demonstrate that, under some regularity conditions, the resulting suboptimal MPC control law recovers the qualitative robust stability properties of optimal MPC, if the communication budget at each sampling time is large enough.
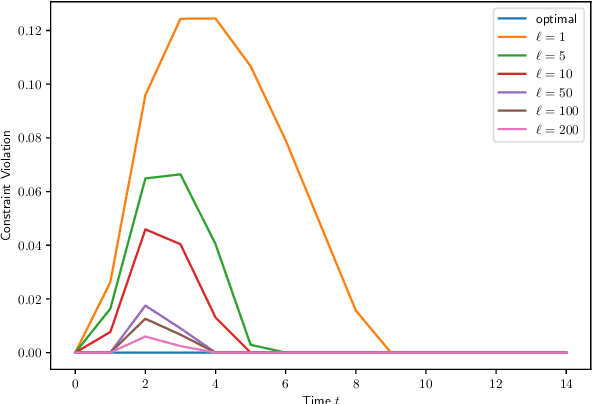
Data-driven Reference Trajectory Optimization for Precision Motion Systems
May 31, 2022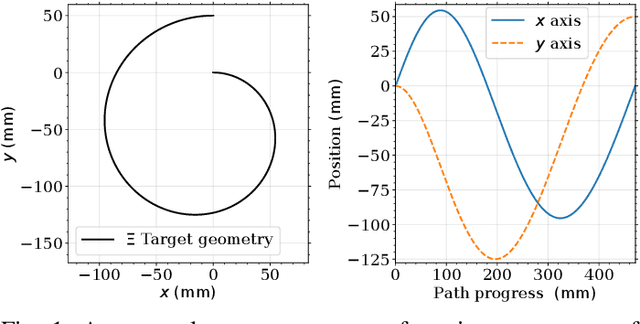

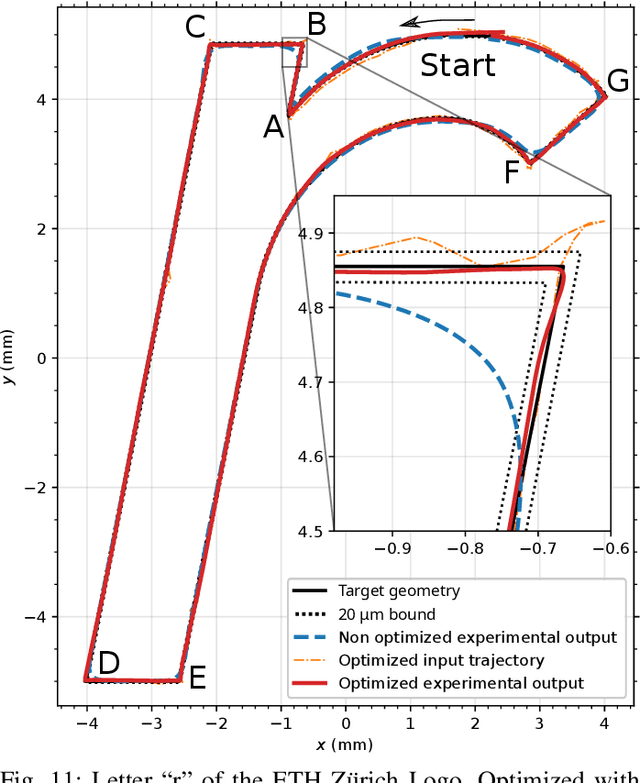
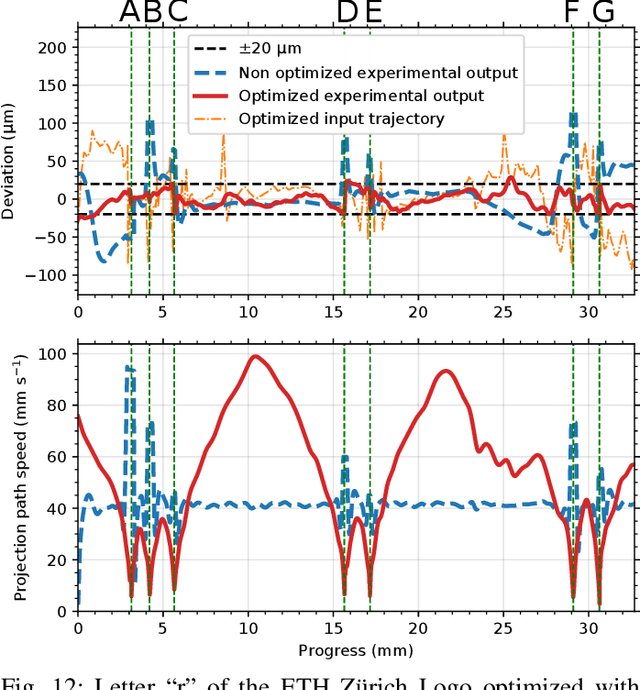
We propose an optimization-based method to improve contour tracking performance on precision motion stages by modifying the reference trajectory, without changing the built-in low-level controller. The position of the precision motion stage is predicted with data-driven models. First, a linear low-fidelity model is used to optimize traversal time, by changing the path velocity and acceleration profiles. Second, a non-linear high-fidelity model is used to refine the previously found time-optimal solution. We experimentally demonstrate that the method is capable of improving the productivity vs. accuracy trade-off for a high precision motion stage. Given the data-based nature of the models used, we claim that the method can easily be adapted to a wide family of precision motion systems.