 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI2STOW: End-to-End Deep Reinforcement Learning to Construct Master Stowage Plans under Demand Uncertainty
Apr 06, 2025



The worldwide economy and environmental sustainability depend on eff icient and reliable supply chains, in which container shipping plays a crucial role as an environmentally friendly mode of transport. Liner shipping companies seek to improve operational efficiency by solving the stowage planning problem. Due to many complex combinatorial aspects, stowage planning is challenging and often decomposed into two NP-hard subproblems: master and slot planning. This article proposes AI2STOW, an end-to-end deep reinforcement learning model with feasibility projection and an action mask to create master plans under demand uncertainty with global objectives and constraints, including paired block stowage patterms. Our experimental results demonstrate that AI2STOW outperforms baseline methods from reinforcement learning and stochastic programming in objective performance and computational efficiency, based on simulated instances reflecting the scale of realistic vessels and operational planning horizons.
Navigating Demand Uncertainty in Container Shipping: Deep Reinforcement Learning for Enabling Adaptive and Feasible Master Stowage Planning
Feb 19, 2025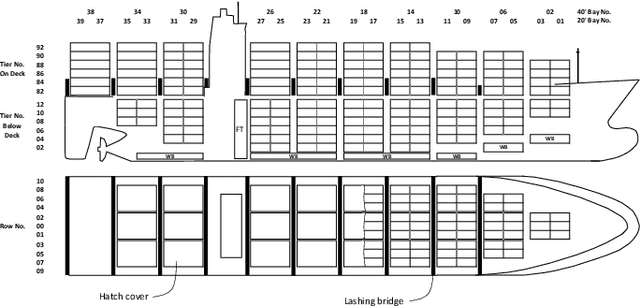
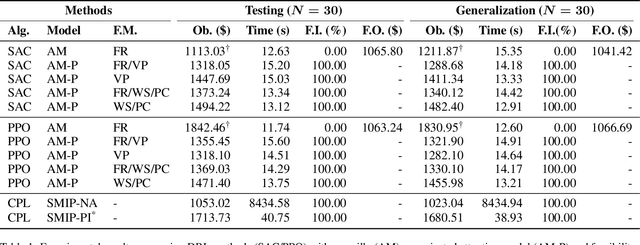
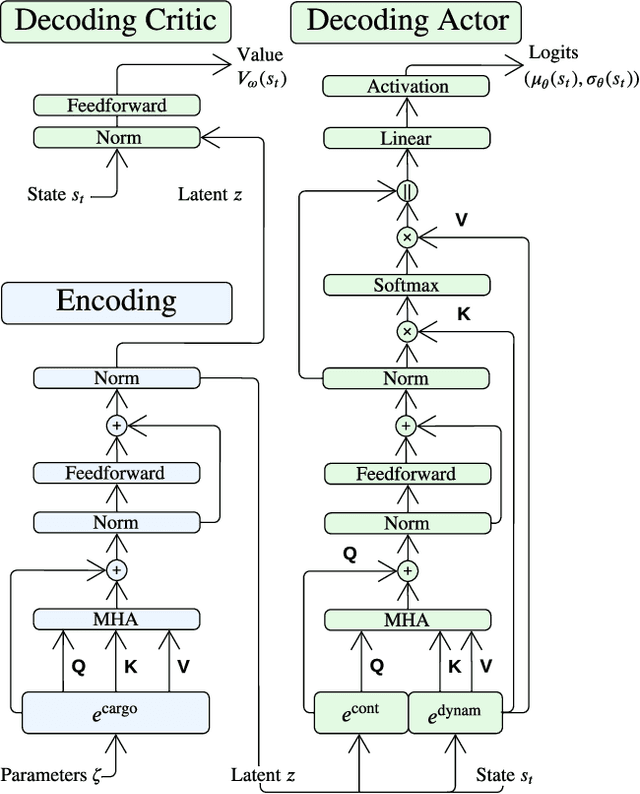
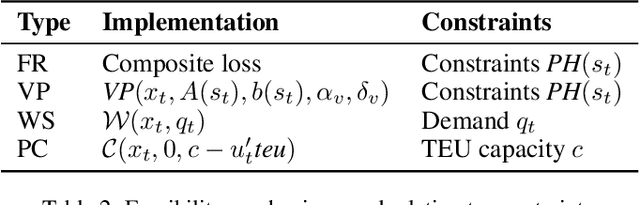
Reinforcement learning (RL) has shown promise in solving various combinatorial optimization problems. However, conventional RL faces challenges when dealing with real-world constraints, especially when action space feasibility is explicit and dependent on the corresponding state or trajectory. In this work, we focus on using RL in container shipping, often considered the cornerstone of global trade, by dealing with the critical challenge of master stowage planning. The main objective is to maximize cargo revenue and minimize operational costs while navigating demand uncertainty and various complex operational constraints, namely vessel capacity and stability, which must be dynamically updated along the vessel's voyage. To address this problem, we implement a deep reinforcement learning framework with feasibility projection to solve the master stowage planning problem (MPP) under demand uncertainty. The experimental results show that our architecture efficiently finds adaptive, feasible solutions for this multi-stage stochastic optimization problem, outperforming traditional mixed-integer programming and RL with feasibility regularization. Our AI-driven decision-support policy enables adaptive and feasible planning under uncertainty, optimizing operational efficiency and capacity utilization while contributing to sustainable and resilient global supply chains.
Procedurally generating rules to adapt difficulty for narrative puzzle games
Jul 07, 2023This paper focuses on procedurally generating rules and communicating them to players to adjust the difficulty. This is part of a larger project to collect and adapt games in educational games for young children using a digital puzzle game designed for kindergarten. A genetic algorithm is used together with a difficulty measure to find a target number of solution sets and a large language model is used to communicate the rules in a narrative context. During testing the approach was able to find rules that approximate any given target difficulty within two dozen generations on average. The approach was combined with a large language model to create a narrative puzzle game where players have to host a dinner for animals that can't get along. Future experiments will try to improve evaluation, specialize the language model on children's literature, and collect multi-modal data from players to guide adaptation.
Safer Reinforcement Learning through Transferable Instinct Networks
Jul 14, 2021


Random exploration is one of the main mechanisms through which reinforcement learning (RL) finds well-performing policies. However, it can lead to undesirable or catastrophic outcomes when learning online in safety-critical environments. In fact, safe learning is one of the major obstacles towards real-world agents that can learn during deployment. One way of ensuring that agents respect hard limitations is to explicitly configure boundaries in which they can operate. While this might work in some cases, we do not always have clear a-priori information which states and actions can lead dangerously close to hazardous states. Here, we present an approach where an additional policy can override the main policy and offer a safer alternative action. In our instinct-regulated RL (IR^2L) approach, an "instinctual" network is trained to recognize undesirable situations, while guarding the learning policy against entering them. The instinct network is pre-trained on a single task where it is safe to make mistakes, and transferred to environments in which learning a new task safely is critical. We demonstrate IR^2L in the OpenAI Safety gym domain, in which it receives a significantly lower number of safety violations during training than a baseline RL approach while reaching similar task performance.
Growing 3D Artefacts and Functional Machines with Neural Cellular Automata
Mar 15, 2021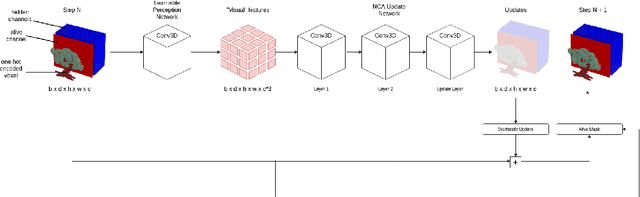
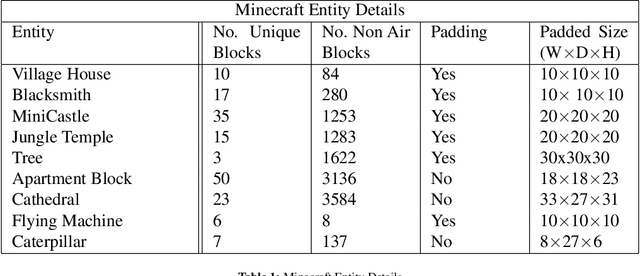
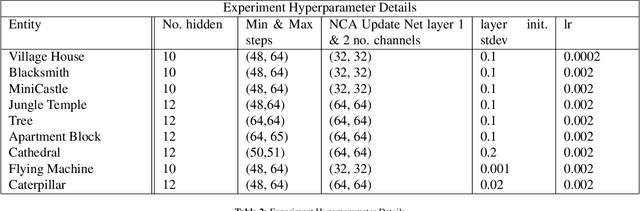
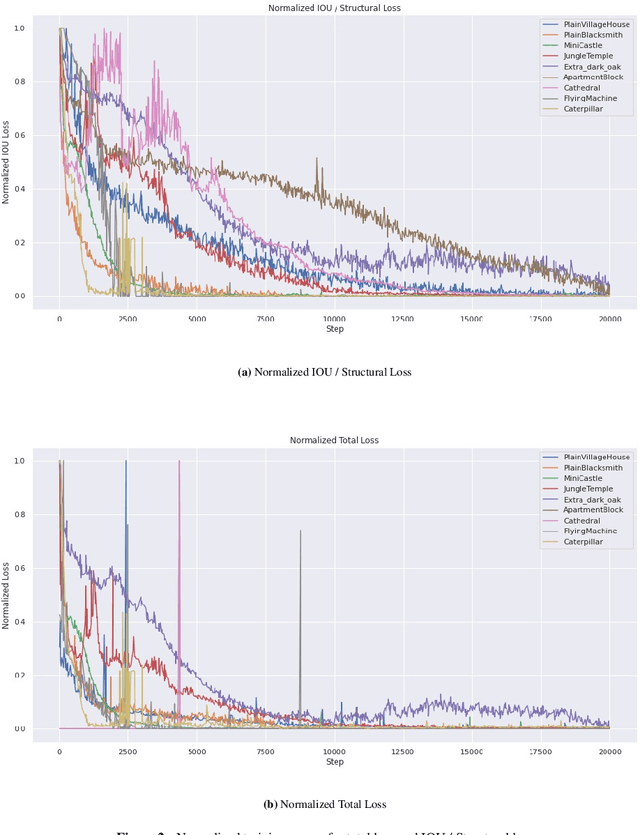
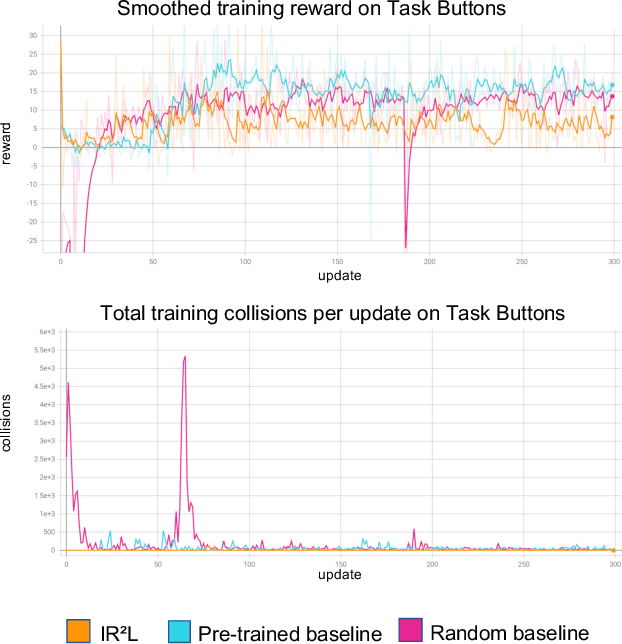
Neural Cellular Automata (NCAs) have been proven effective in simulating morphogenetic processes, the continuous construction of complex structures from very few starting cells. Recent developments in NCAs lie in the 2D domain, namely reconstructing target images from a single pixel or infinitely growing 2D textures. In this work, we propose an extension of NCAs to 3D, utilizing 3D convolutions in the proposed neural network architecture. Minecraft is selected as the environment for our automaton since it allows the generation of both static structures and moving machines. We show that despite their simplicity, NCAs are capable of growing complex entities such as castles, apartment blocks, and trees, some of which are composed of over 3,000 blocks. Additionally, when trained for regeneration, the system is able to regrow parts of simple functional machines, significantly expanding the capabilities of simulated morphogenetic systems.
EvoCraft: A New Challenge for Open-Endedness
Dec 08, 2020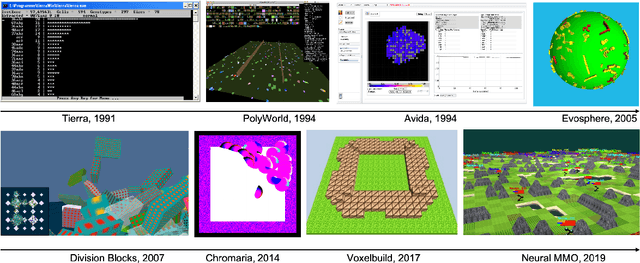
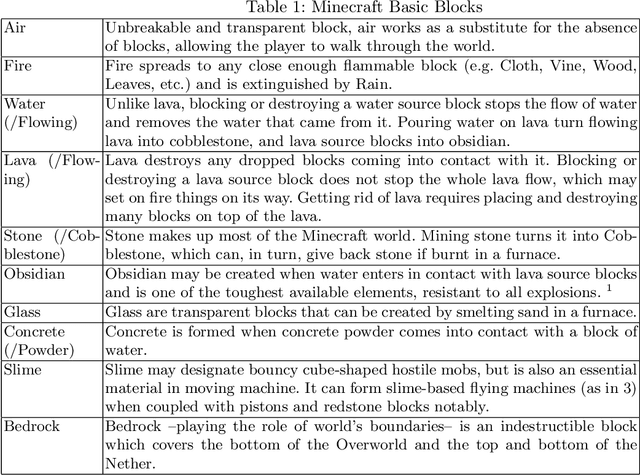
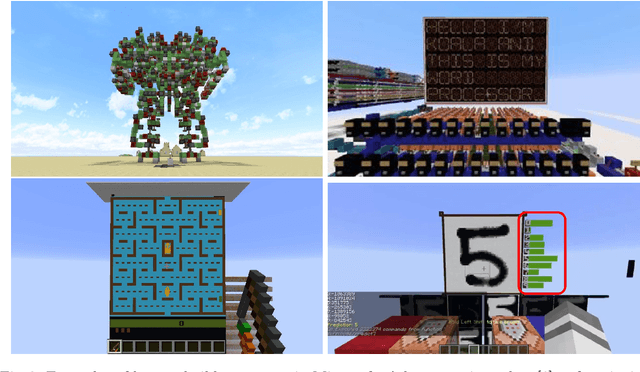
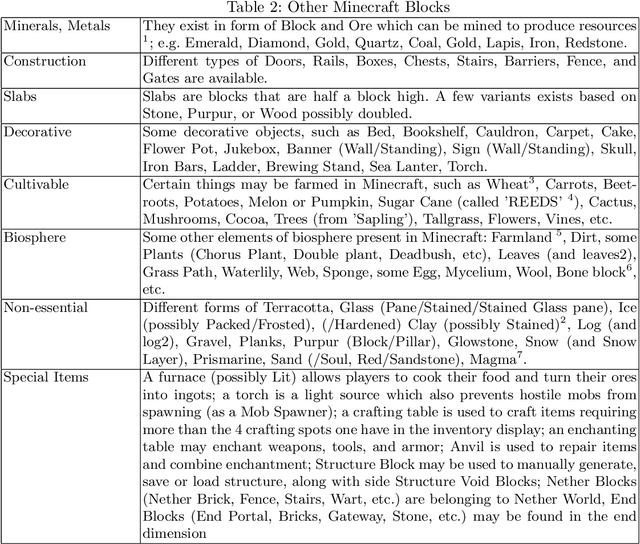
This paper introduces EvoCraft, a framework for Minecraft designed to study open-ended algorithms. We introduce an API that provides an open-source Python interface for communicating with Minecraft to place and track blocks. In contrast to previous work in Minecraft that focused on learning to play the game, the grand challenge we pose here is to automatically search for increasingly complex artifacts in an open-ended fashion. Compared to other environments used to study open-endedness, Minecraft allows the construction of almost any kind of structure, including actuated machines with circuits and mechanical components. We present initial baseline results in evolving simple Minecraft creations through both interactive and automated evolution. While evolution succeeds when tasked to grow a structure towards a specific target, it is unable to find a solution when rewarded for creating a simple machine that moves. Thus, EvoCraft offers a challenging new environment for automated search methods (such as evolution) to find complex artifacts that we hope will spur the development of more open-ended algorithms. A Python implementation of the EvoCraft framework is available at: https://github.com/real-itu/Evocraft-py.
Safe Reinforcement Learning through Meta-learned Instincts
May 06, 2020


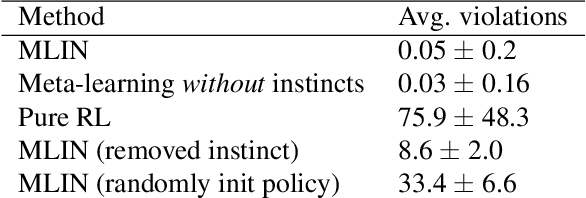
An important goal in reinforcement learning is to create agents that can quickly adapt to new goals while avoiding situations that might cause damage to themselves or their environments. One way agents learn is through exploration mechanisms, which are needed to discover new policies. However, in deep reinforcement learning, exploration is normally done by injecting noise in the action space. While performing well in many domains, this setup has the inherent risk that the noisy actions performed by the agent lead to unsafe states in the environment. Here we introduce a novel approach called Meta-Learned Instinctual Networks (MLIN) that allows agents to safely learn during their lifetime while avoiding potentially hazardous states. At the core of the approach is a plastic network trained through reinforcement learning and an evolved "instinctual" network, which does not change during the agent's lifetime but can modulate the noisy output of the plastic network. We test our idea on a simple 2D navigation task with no-go zones, in which the agent has to learn to approach new targets during deployment. MLIN outperforms standard meta-trained networks and allows agents to learn to navigate to new targets without colliding with any of the no-go zones. These results suggest that meta-learning augmented with an instinctual network is a promising new approach for safe AI, which may enable progress in this area on a variety of different domains.