 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Detection to Action Recognition: An Edge-Based Pipeline for Robot Human Perception
Dec 06, 2023



Mobile service robots are proving to be increasingly effective in a range of applications, such as healthcare, monitoring Activities of Daily Living (ADL), and facilitating Ambient Assisted Living (AAL). These robots heavily rely on Human Action Recognition (HAR) to interpret human actions and intentions. However, for HAR to function effectively on service robots, it requires prior knowledge of human presence (human detection) and identification of individuals to monitor (human tracking). In this work, we propose an end-to-end pipeline that encompasses the entire process, starting from human detection and tracking, leading to action recognition. The pipeline is designed to operate in near real-time while ensuring all stages of processing are performed on the edge, reducing the need for centralised computation. To identify the most suitable models for our mobile robot, we conducted a series of experiments comparing state-of-the-art solutions based on both their detection performance and efficiency. To evaluate the effectiveness of our proposed pipeline, we proposed a dataset comprising daily household activities. By presenting our findings and analysing the results, we demonstrate the efficacy of our approach in enabling mobile robots to understand and respond to human behaviour in real-world scenarios relying mainly on the data from their RGB cameras.
A Survey of Robotic Harvesting Systems and Enabling Technologies
Jul 22, 2022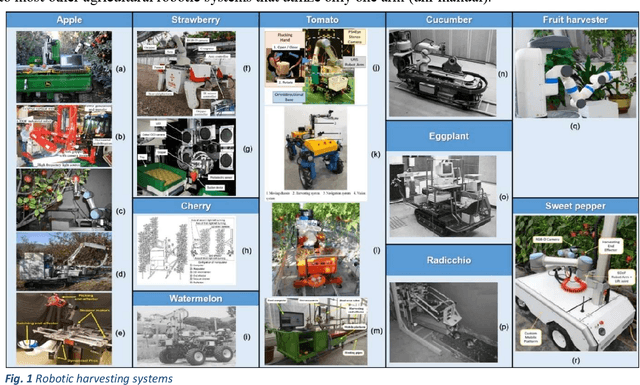
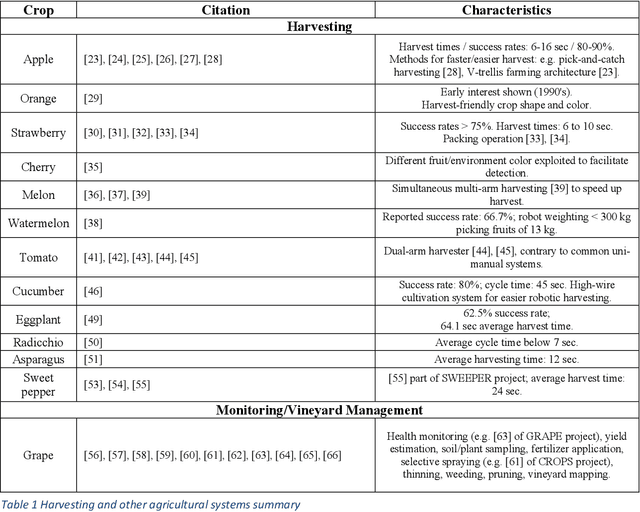

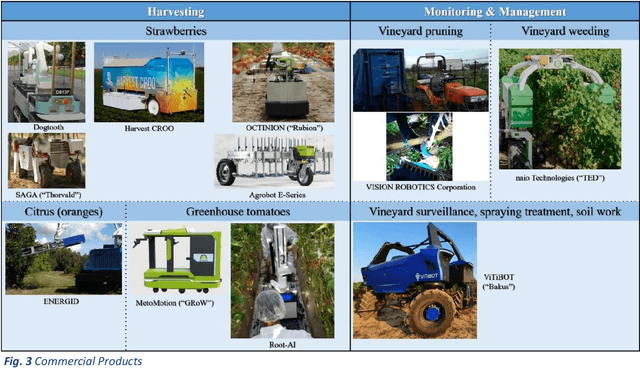
This paper presents a comprehensive review of ground agricultural robotic systems and applications with special focus on harvesting that span research and commercial products and results, as well as their enabling technologies. The majority of literature concerns the development of crop detection, field navigation via vision and their related challenges. Health monitoring, yield estimation, water status inspection, seed planting and weed removal are frequently encountered tasks. Regarding robotic harvesting, apples, strawberries, tomatoes and sweet peppers are mainly the crops considered in publications, research projects and commercial products. The reported harvesting agricultural robotic solutions, typically consist of a mobile platform, a single robotic arm/manipulator and various navigation/vision systems. This paper reviews reported development of specific functionalities and hardware, typically required by an operating agricultural robot harvester; they include (a) vision systems, (b) motion planning/navigation methodologies (for the robotic platform and/or arm), (c) Human-Robot-Interaction (HRI) strategies with 3D visualization, (d) system operation planning & grasping strategies and (e) robotic end-effector/gripper design. Clearly, automated agriculture and specifically autonomous harvesting via robotic systems is a research area that remains wide open, offering several challenges where new contributions can be made.
Image-based Natural Language Understanding Using 2D Convolutional Neural Networks
Nov 06, 2018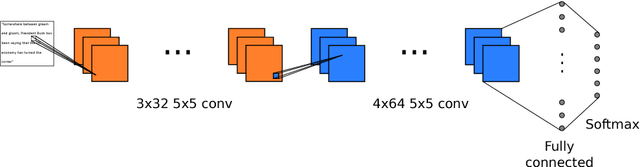
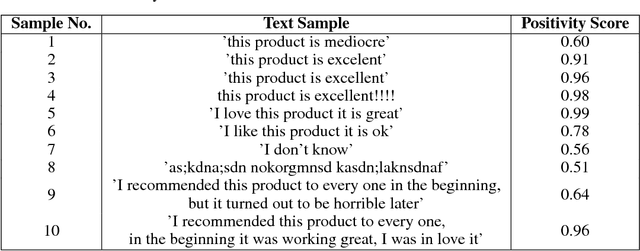


We propose a new approach to natural language understanding in which we consider the input text as an image and apply 2D Convolutional Neural Networks to learn the local and global semantics of the sentences from the variations ofthe visual patterns of words. Our approach demonstrates that it is possible to get semantically meaningful features from images with text without using optical character recognition and sequential processing pipelines, techniques that traditional Natural Language Understanding algorithms require. To validate our approach, we present results for two applications: text classification and dialog modeling. Using a 2D Convolutional Neural Network, we were able to outperform the state-of-art accuracy results of non-Latin alphabet-based text classification and achieved promising results for eight text classification datasets. Furthermore, our approach outperformed the memory networks when using out of vocabulary entities fromtask 4 of the bAbI dialog dataset.