 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHidden Parameter Recurrent State Space Models For Changing Dynamics Scenarios
Jun 29, 2022

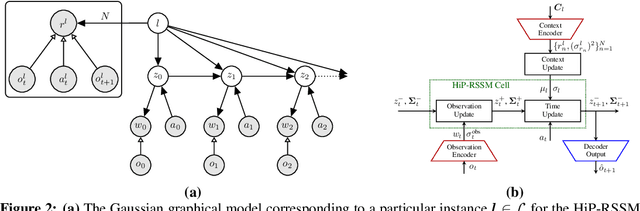
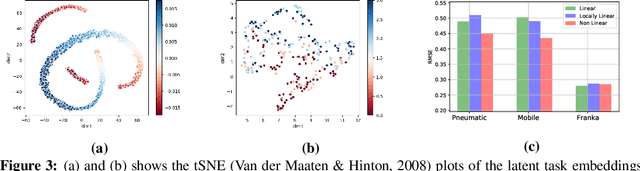
Recurrent State-space models (RSSMs) are highly expressive models for learning patterns in time series data and system identification. However, these models assume that the dynamics are fixed and unchanging, which is rarely the case in real-world scenarios. Many control applications often exhibit tasks with similar but not identical dynamics which can be modeled as a latent variable. We introduce the Hidden Parameter Recurrent State Space Models (HiP-RSSMs), a framework that parametrizes a family of related dynamical systems with a low-dimensional set of latent factors. We present a simple and effective way of learning and performing inference over this Gaussian graphical model that avoids approximations like variational inference. We show that HiP-RSSMs outperforms RSSMs and competing multi-task models on several challenging robotic benchmarks both on real-world systems and simulations.
Action-Conditional Recurrent Kalman Networks For Forward and Inverse Dynamics Learning
Nov 05, 2020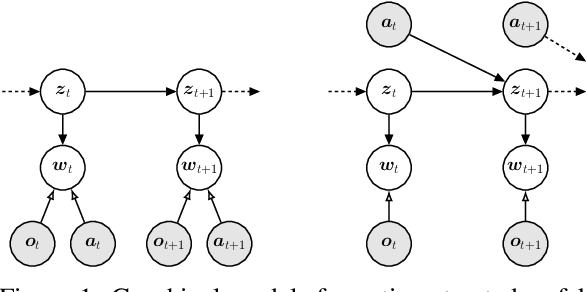

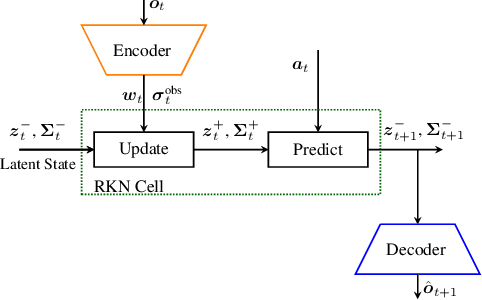

Estimating accurate forward and inverse dynamics models is a crucial component of model-based control for sophisticated robots such as robots driven by hydraulics, artificial muscles, or robots dealing with different contact situations. Analytic models to such processes are often unavailable or inaccurate due to complex hysteresis effects, unmodelled friction and stiction phenomena,and unknown effects during contact situations. A promising approach is to obtain spatio-temporal models in a data-driven way using recurrent neural networks, as they can overcome those issues. However, such models often do not meet accuracy demands sufficiently, degenerate in performance for the required high sampling frequencies and cannot provide uncertainty estimates. We adopt a recent probabilistic recurrent neural network architecture, called Re-current Kalman Networks (RKNs), to model learning by conditioning its transition dynamics on the control actions. RKNs outperform standard recurrent networks such as LSTMs on many state estimation tasks. Inspired by Kalman filters, the RKN provides an elegant way to achieve action conditioning within its recurrent cell by leveraging additive interactions between the current latent state and the action variables. We present two architectures, one for forward model learning and one for inverse model learning. Both architectures significantly outperform exist-ing model learning frameworks as well as analytical models in terms of prediction performance on a variety of real robot dynamics models.