 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hierarchical Region-Based Approach for Efficient Multi-Robot Exploration
Mar 17, 2025Multi-robot autonomous exploration in an unknown environment is an important application in robotics.Traditional exploration methods only use information around frontier points or viewpoints, ignoring spatial information of unknown areas. Moreover, finding the exact optimal solution for multi-robot task allocation is NP-hard, resulting in significant computational time consumption. To address these issues, we present a hierarchical multi-robot exploration framework using a new modeling method called RegionGraph. The proposed approach makes two main contributions: 1) A new modeling method for unexplored areas that preserves their spatial information across the entire space in a weighted graph called RegionGraph. 2) A hierarchical multi-robot exploration framework that decomposes the global exploration task into smaller subtasks, reducing the frequency of global planning and enabling asynchronous exploration. The proposed method is validated through both simulation and real-world experiments, demonstrating a 20% improvement in efficiency compared to existing methods.
A Machine Learning Approach to Digital Contact Tracing: TC4TL Challenge
Mar 08, 2022
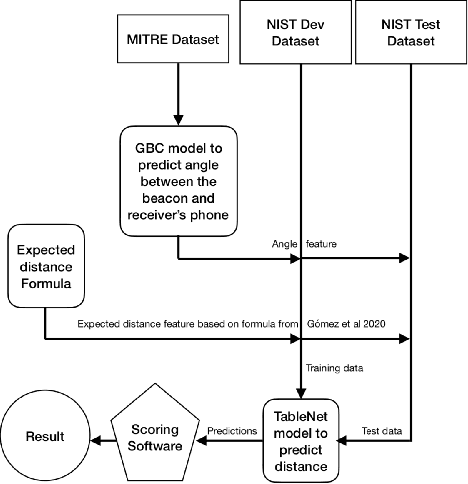
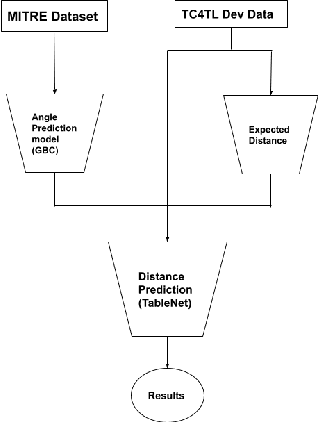
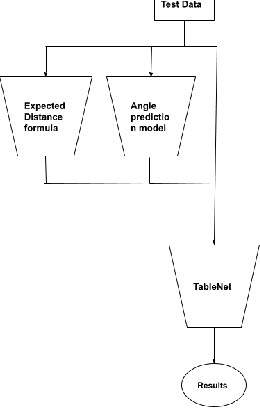
Contact tracing is a method used by public health organisations to try prevent the spread of infectious diseases in the community. Traditionally performed by manual contact tracers, more recently the use of apps have been considered utilising phone sensor data to determine the distance between two phones. In this paper, we investigate the development of machine learning approaches to determine the distance between two mobile phone devices using Bluetooth Low Energy, sensory data and meta data. We use TableNet architecture and feature engineering to improve on the existing state of the art (total nDCF 0.21 vs 2.08), significantly outperforming existing models.
Vertebrae segmentation, identification and localization using a graph optimization and a synergistic cycle
Oct 23, 2021
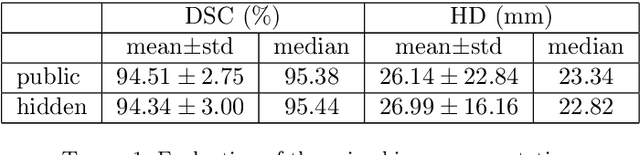
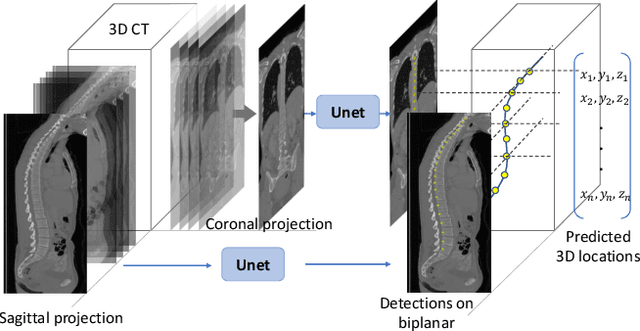
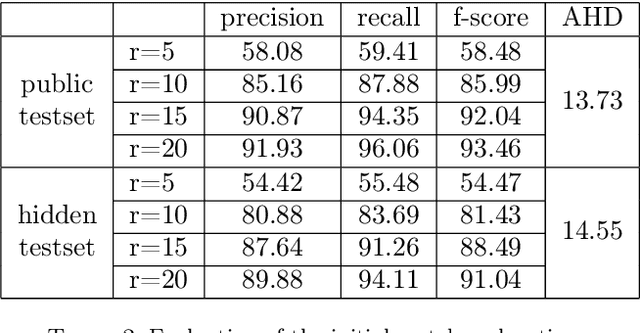
This paper considers the segmentation, identification and localization of vertebrae in CT images. Although these three tasks are related, they face specific problems that add up when they are addressed together. For example neighboring vertebrae with similar shapes perturb the identification and vertebrae with complex or even pathological morphologies impact the segmentation. Consequently, the three tasks tend to be approached independently, e.g. labelling (localization and identification) or segmenting only, or, when treated globally, a sequential strategy is used. Sequential methods however are prone to accumulate errors as they are not able to recover from mistakes of the previous module. In this work, we propose to combine all three tasks and leverage their interdependence: locations ease the segmentation, the segmentations in turn improve the locations and they all contribute and benefit from the identification task. To this purpose we propose a virtuous cycle to enforce coherence between the three tasks. Within such a cycle, the tasks interoperate and are iterated until a global consistency criterion is satisfied. Our experiments validate this strategy with anatomically coherent results that outperform the state of the art on the VerSe20 challenge benchmark. Our code and model are openly available for research purposes at https://gitlab.inria.fr/spine/vertebrae_segmentation.