 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling Human Driving Behavior through Generative Adversarial Imitation Learning
Jun 10, 2020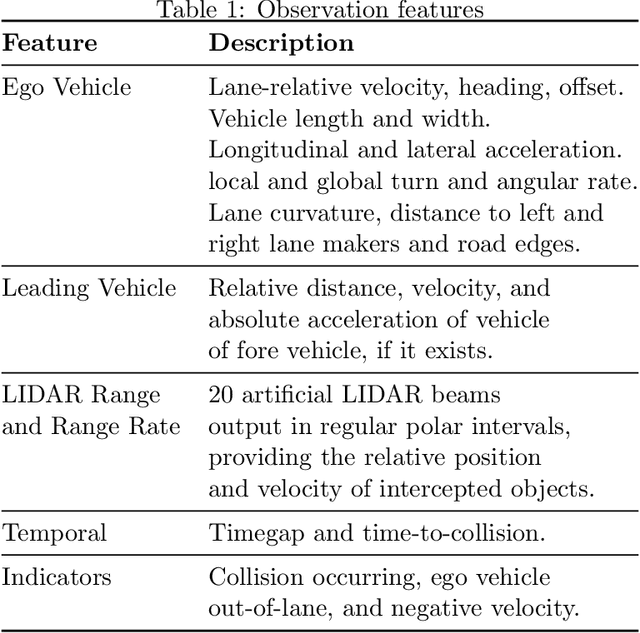
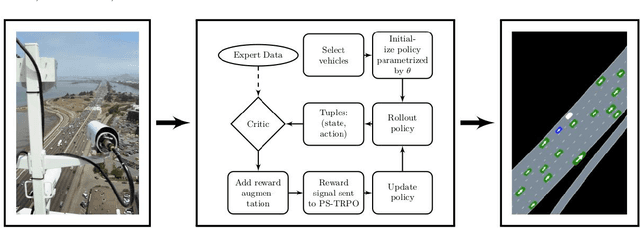
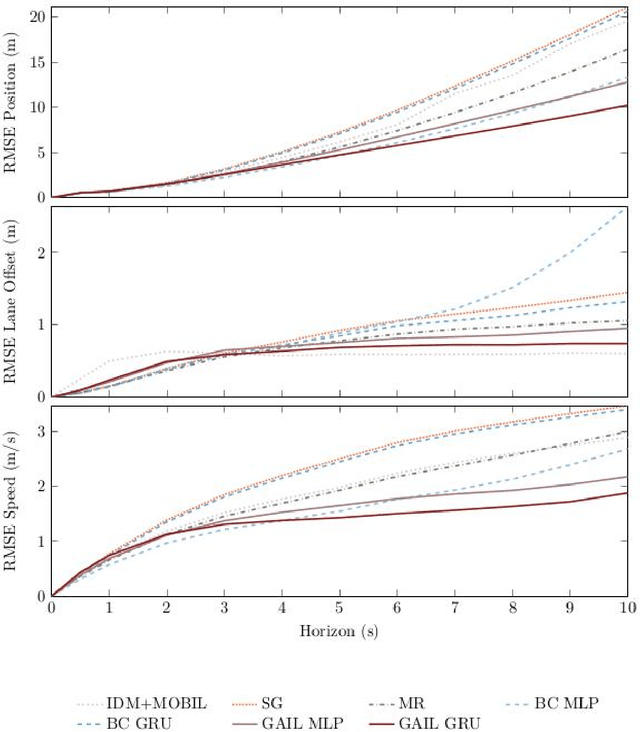
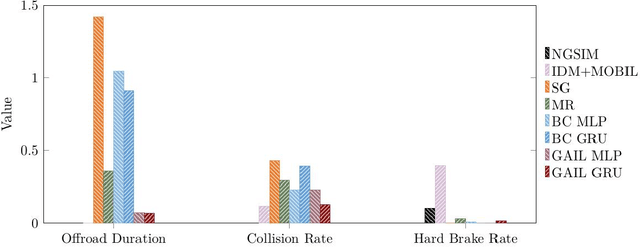
Imitation learning is an approach for generating intelligent behavior when the cost function is unknown or difficult to specify. Building upon work in inverse reinforcement learning (IRL), Generative Adversarial Imitation Learning (GAIL) aims to provide effective imitation even for problems with large or continuous state and action spaces. Driver modeling is one example of a problem where the state and action spaces are continuous. Human driving behavior is characterized by non-linearity and stochasticity, and the underlying cost function is unknown. As a result, learning from human driving demonstrations is a promising approach for generating human-like driving behavior. This article describes the use of GAIL for learning-based driver modeling. Because driver modeling is inherently a multi-agent problem, where the interaction between agents needs to be modeled, this paper describes a parameter-sharing extension of GAIL called PS-GAIL to tackle multi-agent driver modeling. In addition, GAIL is domain agnostic, making it difficult to encode specific knowledge relevant to driving in the learning process. This paper describes Reward Augmented Imitation Learning (RAIL), which modifies the reward signal to provide domain-specific knowledge to the agent. Finally, human demonstrations are dependent upon latent factors that may not be captured by GAIL. This paper describes Burn-InfoGAIL, which allows for disentanglement of latent variability in demonstrations. Imitation learning experiments are performed using NGSIM, a real-world highway driving dataset. Experiments show that these modifications to GAIL can successfully model highway driving behavior, accurately replicating human demonstrations and generating realistic, emergent behavior in the traffic flow arising from the interaction between driving agents.