 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiview Point Cloud Registration via Optimization in an Autoencoder Latent Space
Apr 30, 2025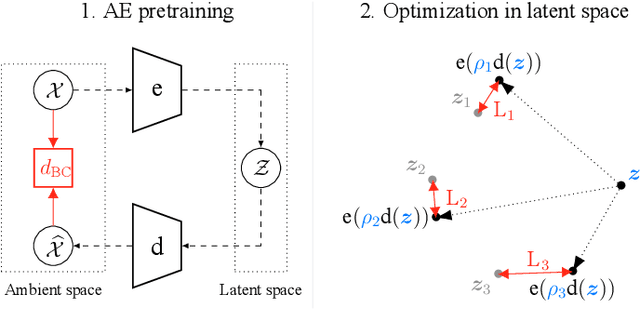



Point cloud rigid registration is a fundamental problem in 3D computer vision. In the multiview case, we aim to find a set of 6D poses to align a set of objects. Methods based on pairwise registration rely on a subsequent synchronization algorithm, which makes them poorly scalable with the number of views. Generative approaches overcome this limitation, but are based on Gaussian Mixture Models and use an Expectation-Maximization algorithm. Hence, they are not well suited to handle large transformations. Moreover, most existing methods cannot handle high levels of degradations. In this paper, we introduce POLAR (POint cloud LAtent Registration), a multiview registration method able to efficiently deal with a large number of views, while being robust to a high level of degradations and large initial angles. To achieve this, we transpose the registration problem into the latent space of a pretrained autoencoder, design a loss taking degradations into account, and develop an efficient multistart optimization strategy. Our proposed method significantly outperforms state-of-the-art approaches on synthetic and real data. POLAR is available at github.com/pypolar/polar or as a standalone package which can be installed with pip install polaregistration.
Fast and robust single particle reconstruction in 3D fluorescence microscopy
Jan 23, 2023Single particle reconstruction has recently emerged in 3D fluorescence microscopy as a powerful technique to improve the axial resolution and the degree of fluorescent labeling. It is based on the reconstruction of an average volume of a biological particle from the acquisition multiple views with unknown poses. Current methods are limited either by template bias, restriction to 2D data, high computational cost or a lack of robustness to low fluorescent labeling. In this work, we propose a single particle reconstruction method dedicated to convolutional models in 3D fluorescence microscopy that overcome these issues. We address the joint reconstruction and estimation of the poses of the particles, which translates into a challenging non-convex optimization problem. Our approach is based on a multilevel reformulation of this problem, and the development of efficient optimization techniques at each level. We demonstrate on synthetic data that our method outperforms the standard approaches in terms of resolution and reconstruction error, while achieving a low computational cost. We also perform successful reconstruction on real datasets of centrioles to show the potential of our method in concrete applications.
Multiview point cloud registration with anisotropic and space-varying localization noise
Jan 03, 2022



In this paper, we address the problem of registering multiple point clouds corrupted with high anisotropic localization noise. Our approach follows the widely used framework of Gaussian mixture model (GMM) reconstruction with an expectation-maximization (EM) algorithm. Existing methods are based on an implicit assumption of space-invariant isotropic Gaussian noise. However, this assumption is violated in practice in applications such as single molecule localization microscopy (SMLM). To address this issue, we propose to introduce an explicit localization noise model that decouples shape modeling with the GMM from noise handling. We design a stochastic EM algorithm that considers noise-free data as a latent variable, with closed-form solutions at each EM step. The first advantage of our approach is to handle space-variant and anisotropic Gaussian noise with arbitrary covariances. The second advantage is to leverage the explicit noise model to impose prior knowledge about the noise that may be available from physical sensors. We show on various simulated data that our noise handling strategy improves significantly the robustness to high levels of anisotropic noise. We also demonstrate the performance of our method on real SMLM data.
Fast Piecewise-Affine Motion Estimation Without Segmentation
Feb 06, 2018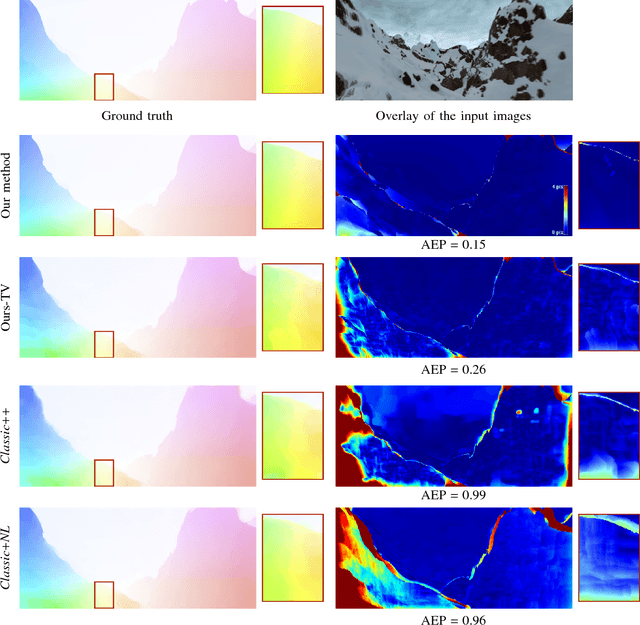
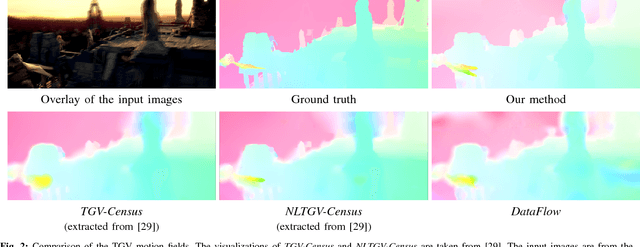


Current algorithmic approaches for piecewise affine motion estimation are based on alternating motion segmentation and estimation. We propose a new method to estimate piecewise affine motion fields directly without intermediate segmentation. To this end, we reformulate the problem by imposing piecewise constancy of the parameter field, and derive a specific proximal splitting optimization scheme. A key component of our framework is an efficient one-dimensional piecewise-affine estimator for vector-valued signals. The first advantage of our approach over segmentation-based methods is its absence of initialization. The second advantage is its lower computational cost which is independent of the complexity of the motion field. In addition to these features, we demonstrate competitive accuracy with other piecewise-parametric methods on standard evaluation benchmarks. Our new regularization scheme also outperforms the more standard use of total variation and total generalized variation.
Aggregation of local parametric candidates with exemplar-based occlusion handling for optical flow
Jul 22, 2014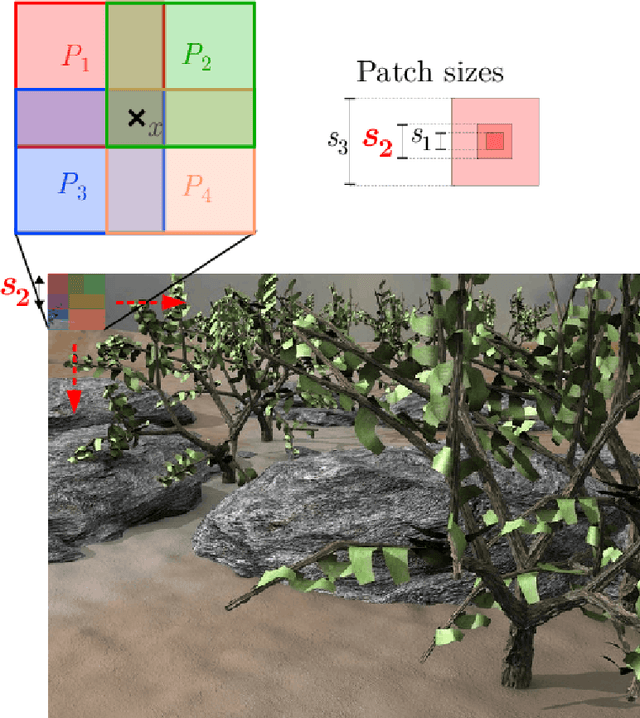
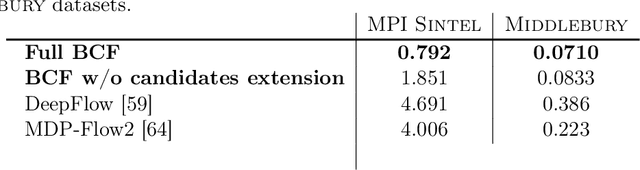
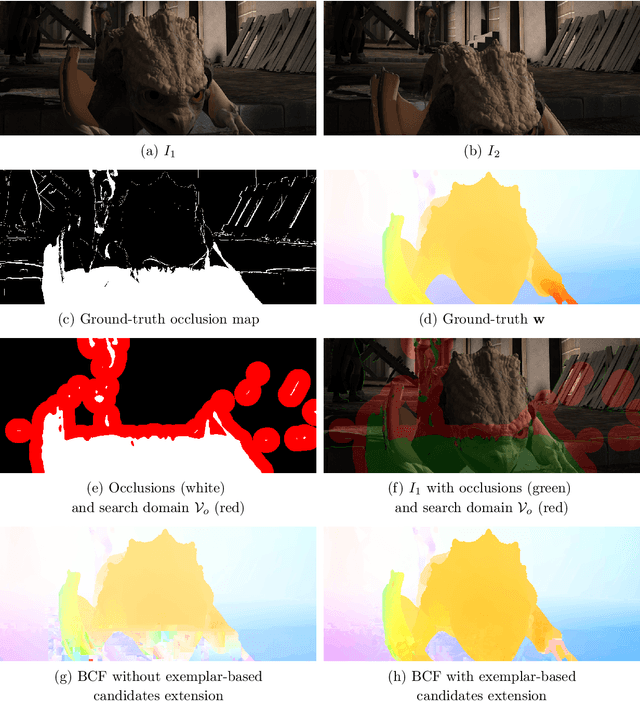
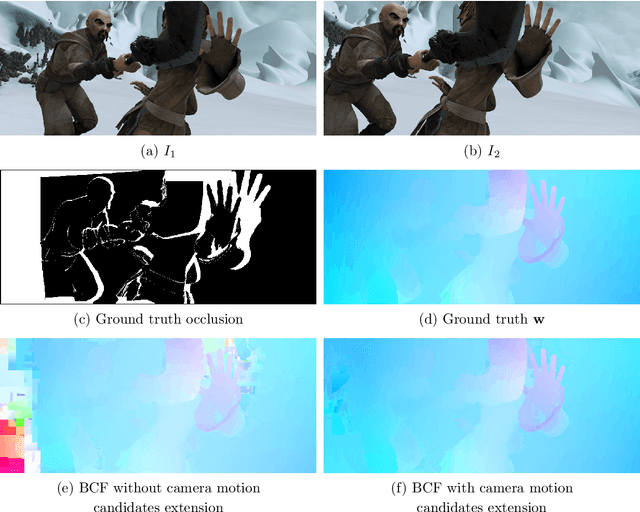
Handling all together large displacements, motion details and occlusions remains an open issue for reliable computation of optical flow in a video sequence. We propose a two-step aggregation paradigm to address this problem. The idea is to supply local motion candidates at every pixel in a first step, and then to combine them to determine the global optical flow field in a second step. We exploit local parametric estimations combined with patch correspondences and we experimentally demonstrate that they are sufficient to produce highly accurate motion candidates. The aggregation step is designed as the discrete optimization of a global regularized energy. The occlusion map is estimated jointly with the flow field throughout the two steps. We propose a generic exemplar-based approach for occlusion filling with motion vectors. We achieve state-of-the-art results in computer vision benchmarks, with particularly significant improvements in the case of large displacements and occlusions.