 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Analytical Solution to the IMU Initialization Problem for Visual-Inertial Systems
Mar 05, 2021


The fusion of visual and inertial measurements is becoming more and more popular in the robotics community since both sources of information complement well each other. However, in order to perform this fusion, the biases of the Inertial Measurement Unit (IMU) as well as the direction of gravity must be initialized first. Additionally, in case of a monocular camera, the metric scale is also needed. The most popular visual-inertial initialization approaches rely on accurate vision-only motion estimates to build a non-linear optimization problem that solves for these parameters in an iterative way. In this paper, we rely on the previous work in [1] and propose an analytical solution to estimate the accelerometer bias, the direction of gravity and the scale factor in a maximum-likelihood framework. This formulation results in a very efficient estimation approach and, due to the non-iterative nature of the solution, avoids the intrinsic issues of previous iterative solutions. We present an extensive validation of the proposed IMU initialization approach and a performance comparison against the state-of-the-art approach described in [2] with real data from the publicly available EuRoC dataset, achieving comparable accuracy at a fraction of its computational cost and without requiring an initial guess for the scale factor. We also provide a C++ open source reference implementation.
Intrinsic Calibration of Depth Cameras for Mobile Robots using a Radial Laser Scanner
Jul 03, 2019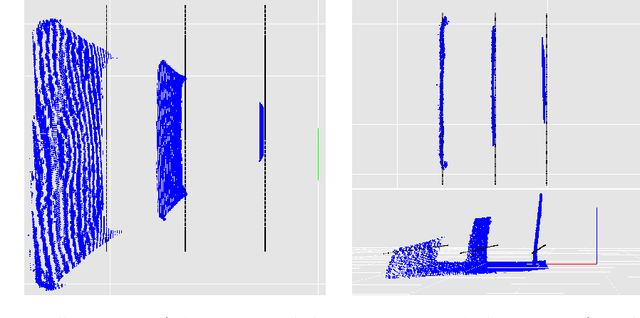
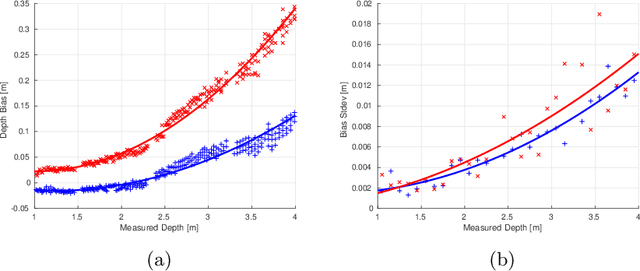
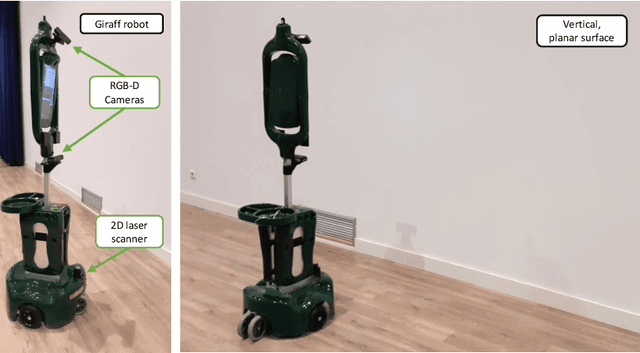

Depth cameras, typically in RGB-D configurations, are common devices in mobile robotic platforms given their appealing features: high frequency and resolution, low price and power requirements, among others. These sensors may come with significant, non-linear errors in the depth measurements that jeopardize robot tasks, like free-space detection, environment reconstruction or visual robot-human interaction. This paper presents a method to calibrate such systematic errors with the help of a second, more precise range sensor, in our case a radial laser scanner. In contrast to what it may seem at first, this does not mean a serious limitation in practice since these two sensors are often mounted jointly in many mobile robotic platforms, as they complement well each other. Moreover, the laser scanner can be used just for the calibration process and get rid of it after that. The main contributions of the paper are: i) the calibration is formulated from a probabilistic perspective through a Maximum Likelihood Estimation problem, and ii) the proposed method can be easily executed automatically by mobile robotic platforms. To validate the proposed approach we evaluated for both, local distortion of 3D planar reconstructions and global shifts in the measurements, obtaining considerably more accurate results. A C++ open-source implementation of the presented method has been released for the benefit of the community.
Automatic Multi-Sensor Extrinsic Calibration for Mobile Robots
Jun 11, 2019
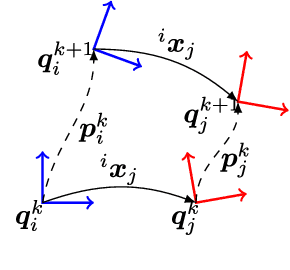
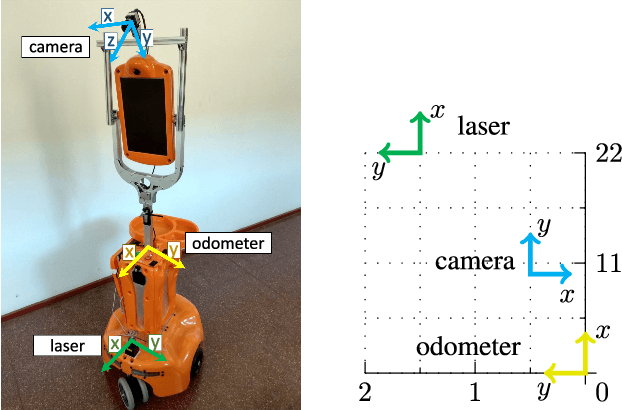
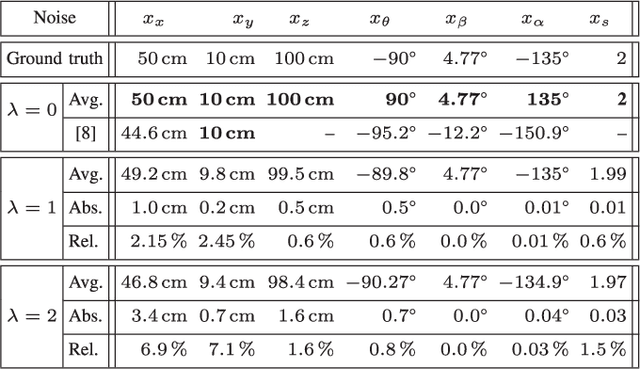
In order to fuse measurements from multiple sensors mounted on a mobile robot, it is needed to express them in a common reference system through their relative spatial transformations. In this paper, we present a method to estimate the full 6DoF extrinsic calibration parameters of multiple heterogeneous sensors (Lidars, Depth and RGB cameras) suitable for automatic execution on a mobile robot. Our method computes the 2D calibration parameters (x, y, yaw) through a motion-based approach, while for the remaining 3 parameters (z, pitch, roll) it requires the observation of the ground plane for a short period of time. What set this proposal apart from others is that: i) all calibration parameters are initialized in closed form, and ii) the scale ambiguity inherent to motion estimation from a monocular camera is explicitly handled, enabling the combination of these sensors and metric ones (Lidars, stereo rigs, etc.) within the same optimization framework. %Additionally, outlier observations arising from local sensor drift are automatically detected and removed from the calibration process. We provide a formal definition of the problem, as well as of the contributed method, for which a C++ implementation has been made publicly available. The suitability of the method has been assessed in simulation an with real data from indoor and outdoor scenarios. Finally, improvements over state-of-the-art motion-based calibration proposals are shown through experimental evaluation.
PL-SLAM: a Stereo SLAM System through the Combination of Points and Line Segments
Apr 09, 2018



Traditional approaches to stereo visual SLAM rely on point features to estimate the camera trajectory and build a map of the environment. In low-textured environments, though, it is often difficult to find a sufficient number of reliable point features and, as a consequence, the performance of such algorithms degrades. This paper proposes PL-SLAM, a stereo visual SLAM system that combines both points and line segments to work robustly in a wider variety of scenarios, particularly in those where point features are scarce or not well-distributed in the image. PL-SLAM leverages both points and segments at all the instances of the process: visual odometry, keyframe selection, bundle adjustment, etc. We contribute also with a loop closure procedure through a novel bag-of-words approach that exploits the combined descriptive power of the two kinds of features. Additionally, the resulting map is richer and more diverse in 3D elements, which can be exploited to infer valuable, high-level scene structures like planes, empty spaces, ground plane, etc. (not addressed in this work). Our proposal has been tested with several popular datasets (such as KITTI and EuRoC), and is compared to state of the art methods like ORB-SLAM, revealing a more robust performance in most of the experiments, while still running in real-time. An open source version of the PL-SLAM C++ code will be released for the benefit of the community.