 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePack it in: Packing into Partially Filled Containers Through Contact
Feb 15, 2026The automation of warehouse operations is crucial for improving productivity and reducing human exposure to hazardous environments. One operation frequently performed in warehouses is bin-packing where items need to be placed into containers, either for delivery to a customer, or for temporary storage in the warehouse. Whilst prior bin-packing works have largely been focused on packing items into empty containers and have adopted collision-free strategies, it is often the case that containers will already be partially filled with items, often in suboptimal arrangements due to transportation about a warehouse. This paper presents a contact-aware packing approach that exploits purposeful interactions with previously placed objects to create free space and enable successful placement of new items. This is achieved by using a contact-based multi-object trajectory optimizer within a model predictive controller, integrated with a physics-aware perception system that estimates object poses even during inevitable occlusions, and a method that suggests physically-feasible locations to place the object inside the container.
A Roadmap for Climate-Relevant Robotics Research
Jul 15, 2025



Climate change is one of the defining challenges of the 21st century, and many in the robotics community are looking for ways to contribute. This paper presents a roadmap for climate-relevant robotics research, identifying high-impact opportunities for collaboration between roboticists and experts across climate domains such as energy, the built environment, transportation, industry, land use, and Earth sciences. These applications include problems such as energy systems optimization, construction, precision agriculture, building envelope retrofits, autonomous trucking, and large-scale environmental monitoring. Critically, we include opportunities to apply not only physical robots but also the broader robotics toolkit - including planning, perception, control, and estimation algorithms - to climate-relevant problems. A central goal of this roadmap is to inspire new research directions and collaboration by highlighting specific, actionable problems at the intersection of robotics and climate. This work represents a collaboration between robotics researchers and domain experts in various climate disciplines, and it serves as an invitation to the robotics community to bring their expertise to bear on urgent climate priorities.
Online state vector reduction during model predictive control with gradient-based trajectory optimisation
Aug 21, 2024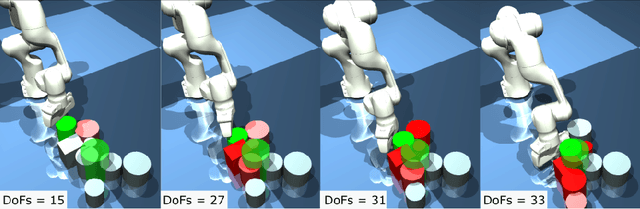
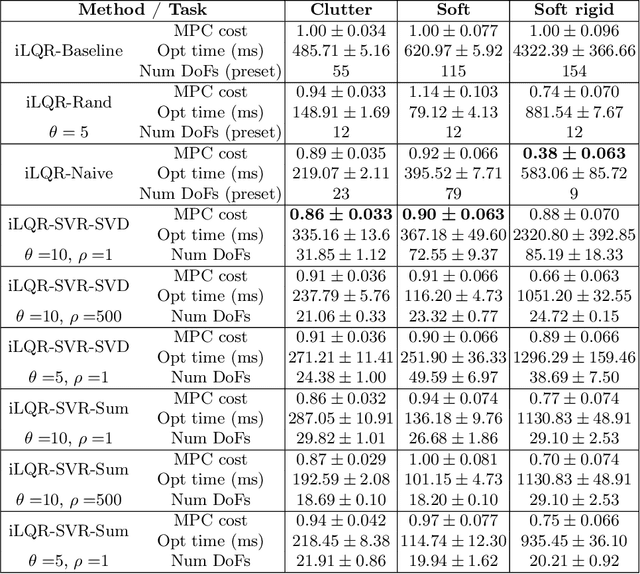
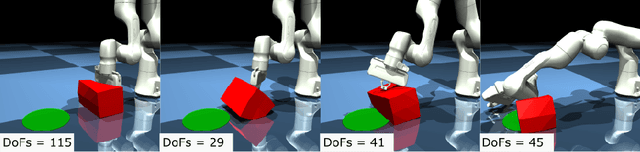
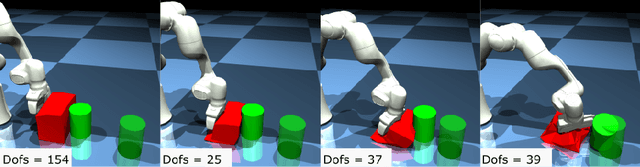
Non-prehensile manipulation in high-dimensional systems is challenging for a variety of reasons, one of the main reasons is the computationally long planning times that come with a large state space. Trajectory optimisation algorithms have proved their utility in a wide variety of tasks, but, like most methods struggle scaling to the high dimensional systems ubiquitous to non-prehensile manipulation in clutter as well as deformable object manipulation. We reason that, during manipulation, different degrees of freedom will become more or less important to the task over time as the system evolves. We leverage this idea to reduce the number of degrees of freedom considered in a trajectory optimisation problem, to reduce planning times. This idea is particularly relevant in the context of model predictive control (MPC) where the cost landscape of the optimisation problem is constantly evolving. We provide simulation results under asynchronous MPC and show our methods are capable of achieving better overall performance due to the decreased policy lag whilst still being able to optimise trajectories effectively.
Classifying geospatial objects from multiview aerial imagery using semantic meshes
May 15, 2024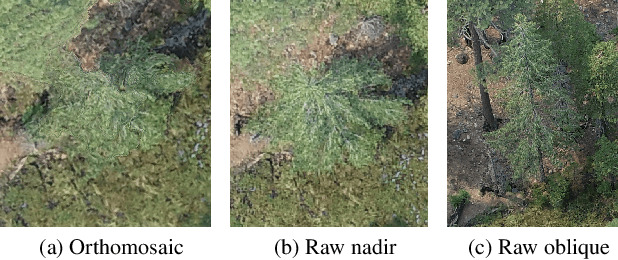


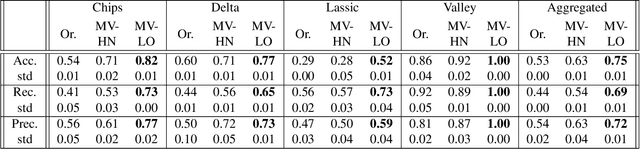
Aerial imagery is increasingly used in Earth science and natural resource management as a complement to labor-intensive ground-based surveys. Aerial systems can collect overlapping images that provide multiple views of each location from different perspectives. However, most prediction approaches (e.g. for tree species classification) use a single, synthesized top-down "orthomosaic" image as input that contains little to no information about the vertical aspects of objects and may include processing artifacts. We propose an alternate approach that generates predictions directly on the raw images and accurately maps these predictions into geospatial coordinates using semantic meshes. This method$\unicode{x2013}$released as a user-friendly open-source toolkit$\unicode{x2013}$enables analysts to use the highest quality data for predictions, capture information about the sides of objects, and leverage multiple viewpoints of each location for added robustness. We demonstrate the value of this approach on a new benchmark dataset of four forest sites in the western U.S. that consists of drone images, photogrammetry results, predicted tree locations, and species classification data derived from manual surveys. We show that our proposed multiview method improves classification accuracy from 53% to 75% relative to an orthomosaic baseline on a challenging cross-site tree species classification task.