 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Start Locations in Ergodic Search for Disaster Response
Jul 03, 2025In disaster response scenarios, deploying robotic teams effectively is crucial for improving situational awareness and enhancing search and rescue operations. The use of robots in search and rescue has been studied but the question of where to start robot deployments has not been addressed. This work addresses the problem of optimally selecting starting locations for robots with heterogeneous capabilities by formulating a joint optimization problem. To determine start locations, this work adds a constraint to the ergodic optimization framework whose minimum assigns robots to start locations. This becomes a little more challenging when the robots are heterogeneous (equipped with different sensing and motion modalities) because not all robots start at the same location, and a more complex adaptation of the aforementioned constraint is applied. Our method assumes access to potential starting locations, which can be obtained from expert knowledge or aerial imagery. We experimentally evaluate the efficacy of our joint optimization approach by comparing it to baseline methods that use fixed starting locations for all robots. Our experimental results show significant gains in coverage performance, with average improvements of 35.98% on synthetic data and 31.91% on real-world data for homogeneous and heterogeneous teams, in terms of the ergodic metric.
Classifying geospatial objects from multiview aerial imagery using semantic meshes
May 15, 2024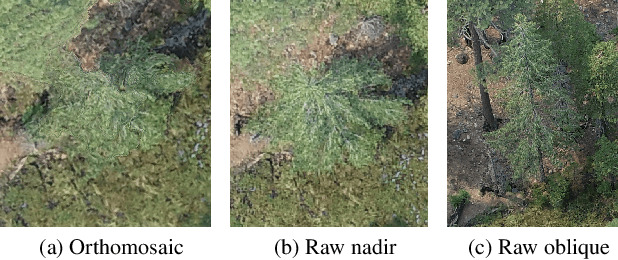


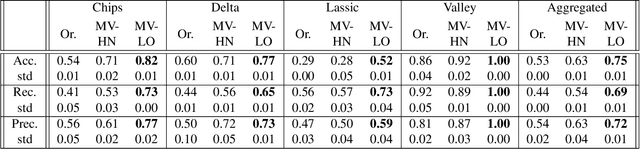
Aerial imagery is increasingly used in Earth science and natural resource management as a complement to labor-intensive ground-based surveys. Aerial systems can collect overlapping images that provide multiple views of each location from different perspectives. However, most prediction approaches (e.g. for tree species classification) use a single, synthesized top-down "orthomosaic" image as input that contains little to no information about the vertical aspects of objects and may include processing artifacts. We propose an alternate approach that generates predictions directly on the raw images and accurately maps these predictions into geospatial coordinates using semantic meshes. This method$\unicode{x2013}$released as a user-friendly open-source toolkit$\unicode{x2013}$enables analysts to use the highest quality data for predictions, capture information about the sides of objects, and leverage multiple viewpoints of each location for added robustness. We demonstrate the value of this approach on a new benchmark dataset of four forest sites in the western U.S. that consists of drone images, photogrammetry results, predicted tree locations, and species classification data derived from manual surveys. We show that our proposed multiview method improves classification accuracy from 53% to 75% relative to an orthomosaic baseline on a challenging cross-site tree species classification task.
Non-myopic Planetary Exploration Combining In Situ and Remote Measurements
Apr 28, 2019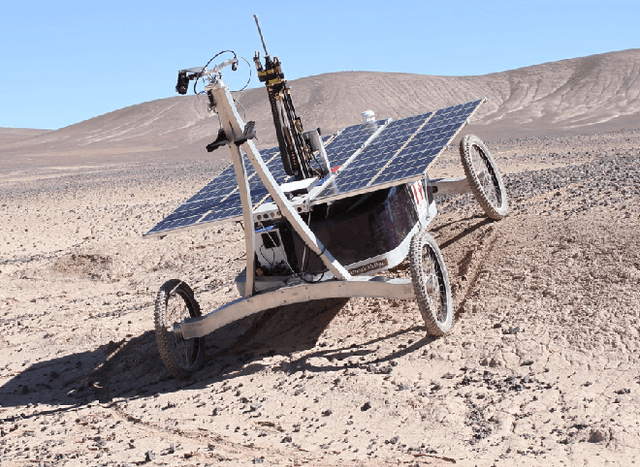
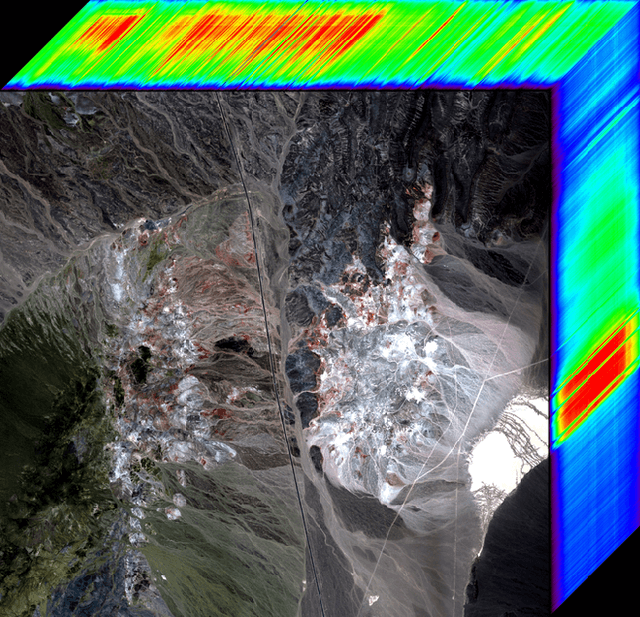
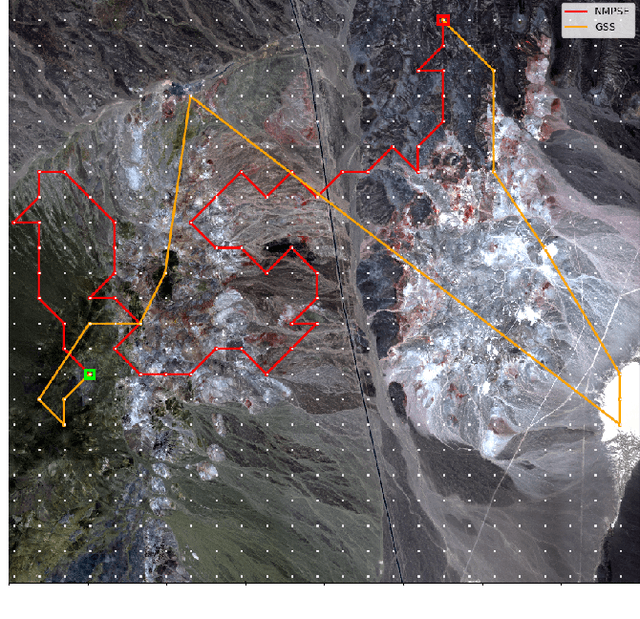
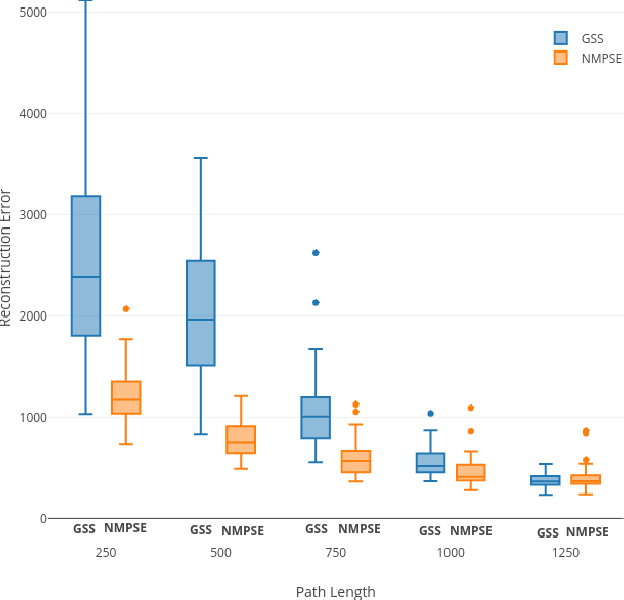
Remote sensing can provide crucial information for planetary rovers. However, they must validate these orbital observations with in situ measurements. Typically, this involves validating hyperspectral data using a spectrometer on-board the field robot. In order to achieve this, the robot must visit sampling locations that jointly improve a model of the environment while satisfying sampling constraints. However, current planners follow sub-optimal greedy strategies that are not scalable to larger regions. We demonstrate how the problem can be effectively defined in an MDP framework and propose a planning algorithm based on Monte Carlo Tree Search, which is devoid of the common drawbacks of existing planners and also provides superior performance. We evaluate our approach using hyperspectral imagery of a well-studied geologic site in Cuprite, Nevada.