 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-myopic Planetary Exploration Combining In Situ and Remote Measurements
Paper and Code
Apr 28, 2019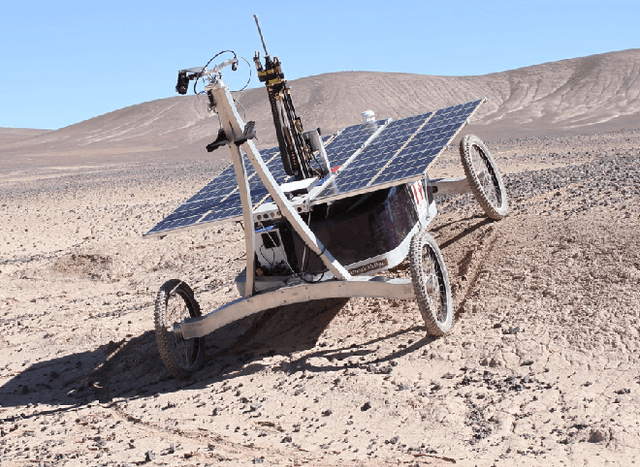
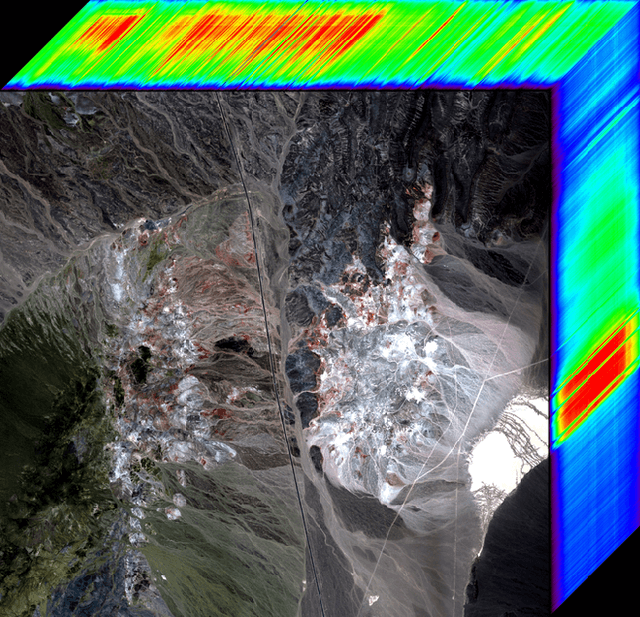
Remote sensing can provide crucial information for planetary rovers. However, they must validate these orbital observations with in situ measurements. Typically, this involves validating hyperspectral data using a spectrometer on-board the field robot. In order to achieve this, the robot must visit sampling locations that jointly improve a model of the environment while satisfying sampling constraints. However, current planners follow sub-optimal greedy strategies that are not scalable to larger regions. We demonstrate how the problem can be effectively defined in an MDP framework and propose a planning algorithm based on Monte Carlo Tree Search, which is devoid of the common drawbacks of existing planners and also provides superior performance. We evaluate our approach using hyperspectral imagery of a well-studied geologic site in Cuprite, Nevada.