 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAV-Assisted Coverage Hole Detection Using Reinforcement Learning in Urban Cellular Networks
Mar 09, 2025Deployment of cellular networks in urban areas requires addressing various challenges. For example, high-rise buildings with varying geometrical shapes and heights contribute to signal attenuation, reflection, diffraction, and scattering effects. This creates a high possibility of coverage holes (CHs) within the proximity of the buildings. Detecting these CHs is critical for network operators to ensure quality of service, as customers in such areas experience weak or no signal reception. To address this challenge, we propose an approach using an autonomous vehicle, such as an unmanned aerial vehicle (UAV), to detect CHs, for minimizing drive test efforts and reducing human labor. The UAV leverages reinforcement learning (RL) to find CHs using stored local building maps, its current location, and measured signal strengths. As the UAV moves, it dynamically updates its knowledge of the signal environment and its direction to a nearby CH while avoiding collisions with buildings. We created a wide range of testing scenarios using building maps from OpenStreetMap and signal strength data generated by NVIDIA Sionna raytracing simulations. The results demonstrate that the RL-based approach performs better than non-machine learning, geometry-based methods in detecting CHs in urban areas. Additionally, even with a limited number of UAV measurements, the method achieves performance close to theoretical upper bounds that assume complete knowledge of all signal strengths.
Towards Live 3D Reconstruction from Wearable Video: An Evaluation of V-SLAM, NeRF, and Videogrammetry Techniques
Nov 21, 2022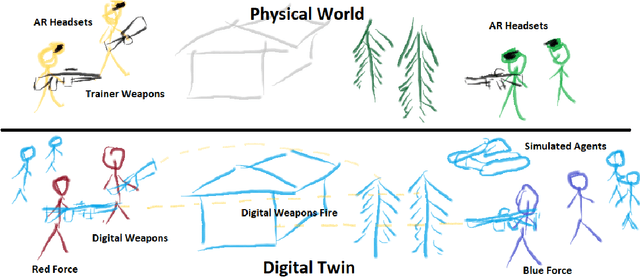
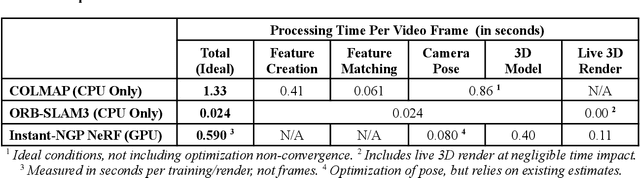
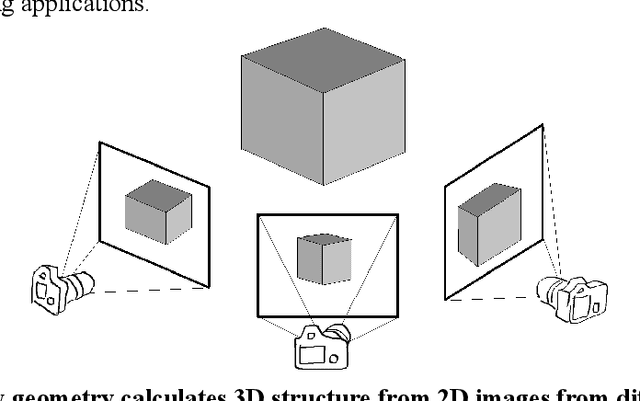
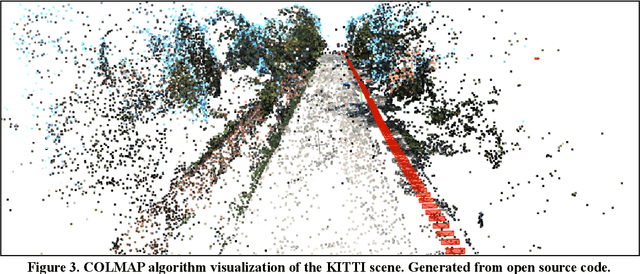
Mixed reality (MR) is a key technology which promises to change the future of warfare. An MR hybrid of physical outdoor environments and virtual military training will enable engagements with long distance enemies, both real and simulated. To enable this technology, a large-scale 3D model of a physical environment must be maintained based on live sensor observations. 3D reconstruction algorithms should utilize the low cost and pervasiveness of video camera sensors, from both overhead and soldier-level perspectives. Mapping speed and 3D quality can be balanced to enable live MR training in dynamic environments. Given these requirements, we survey several 3D reconstruction algorithms for large-scale mapping for military applications given only live video. We measure 3D reconstruction performance from common structure from motion, visual-SLAM, and photogrammetry techniques. This includes the open source algorithms COLMAP, ORB-SLAM3, and NeRF using Instant-NGP. We utilize the autonomous driving academic benchmark KITTI, which includes both dashboard camera video and lidar produced 3D ground truth. With the KITTI data, our primary contribution is a quantitative evaluation of 3D reconstruction computational speed when considering live video.
SafePredict: A Meta-Algorithm for Machine Learning That Uses Refusals to Guarantee Correctness
Nov 09, 2017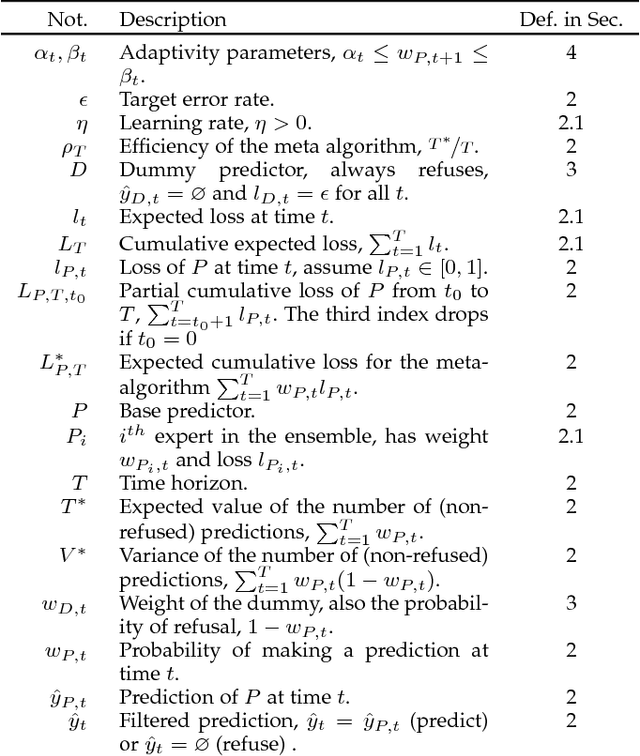
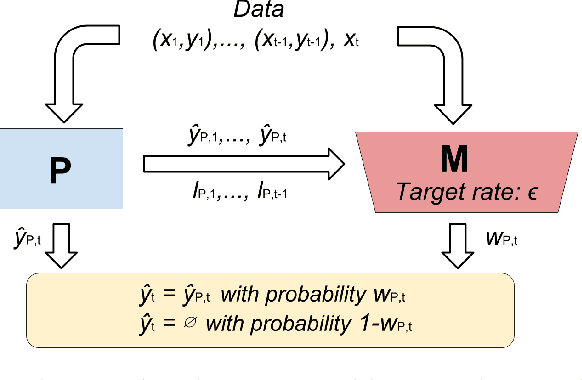
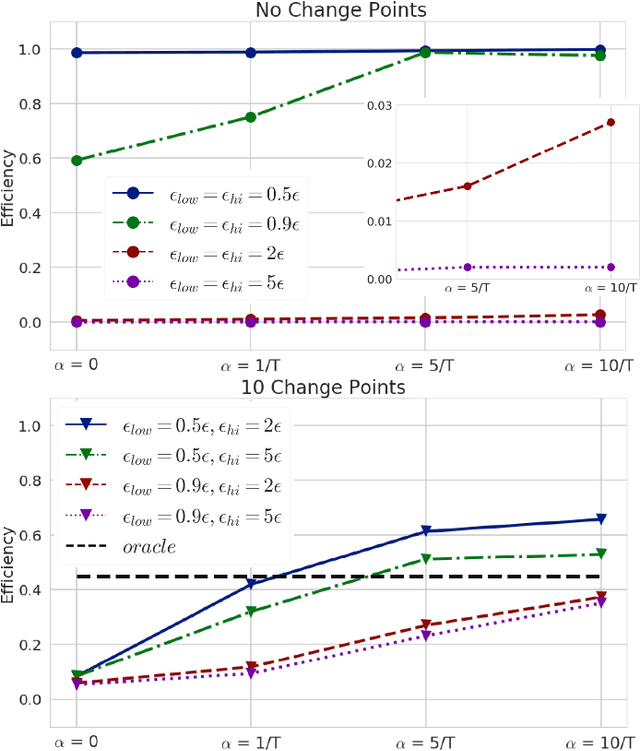
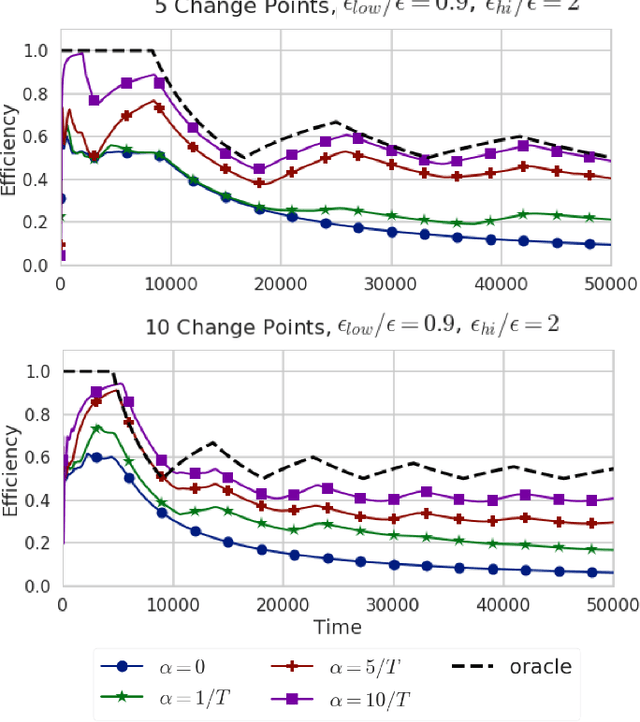
SafePredict is a novel meta-algorithm that works with any base prediction algorithm for online data to guarantee an arbitrarily chosen correctness rate, $1-\epsilon$, by allowing refusals. Allowing refusals means that the meta-algorithm may refuse to emit a prediction produced by the base algorithm on occasion so that the error rate on non-refused predictions does not exceed $\epsilon$. The SafePredict error bound does not rely on any assumptions on the data distribution or the base predictor. When the base predictor happens not to exceed the target error rate $\epsilon$, SafePredict refuses only a finite number of times. When the error rate of the base predictor changes through time SafePredict makes use of a weight-shifting heuristic that adapts to these changes without knowing when the changes occur yet still maintains the correctness guarantee. Empirical results show that (i) SafePredict compares favorably with state-of-the art confidence based refusal mechanisms which fail to offer robust error guarantees; and (ii) combining SafePredict with such refusal mechanisms can in many cases further reduce the number of refusals. Our software (currently in Python) is included in the supplementary material.