 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Learning and Planning in Cognitive Hierarchies
Oct 18, 2023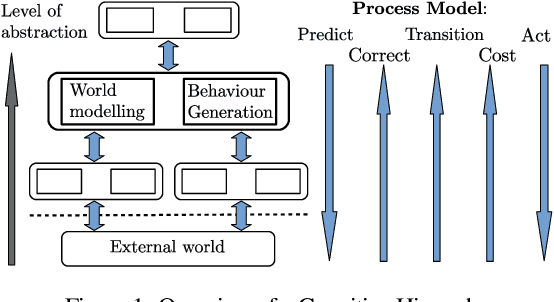
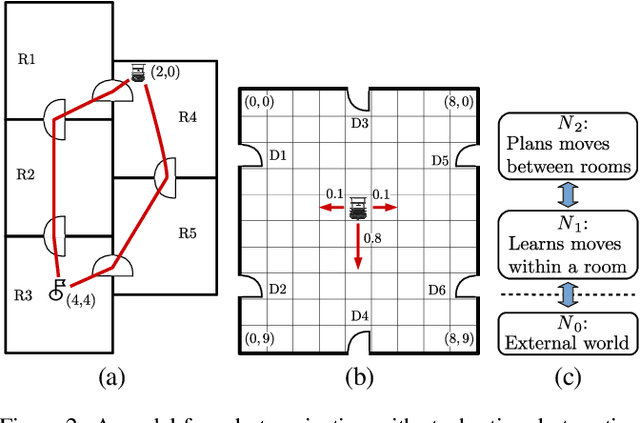
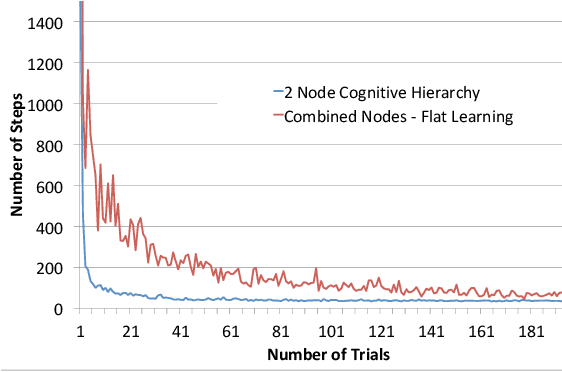
Complex robot behaviour typically requires the integration of multiple robotic and Artificial Intelligence (AI) techniques and components. Integrating such disparate components into a coherent system, while also ensuring global properties and behaviours, is a significant challenge for cognitive robotics. Using a formal framework to model the interactions between components can be an important step in dealing with this challenge. In this paper we extend an existing formal framework [Clark et al., 2016] to model complex integrated reasoning behaviours of robotic systems; from symbolic planning through to online learning of policies and transition systems. Furthermore the new framework allows for a more flexible modelling of the interactions between different reasoning components.
Perceptual Context in Cognitive Hierarchies
Jan 07, 2018
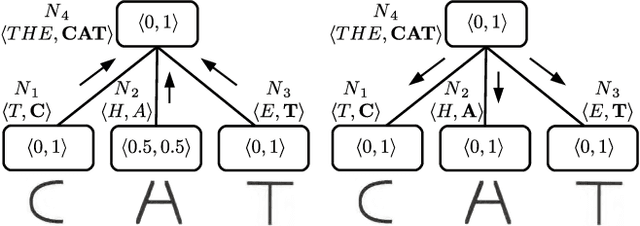
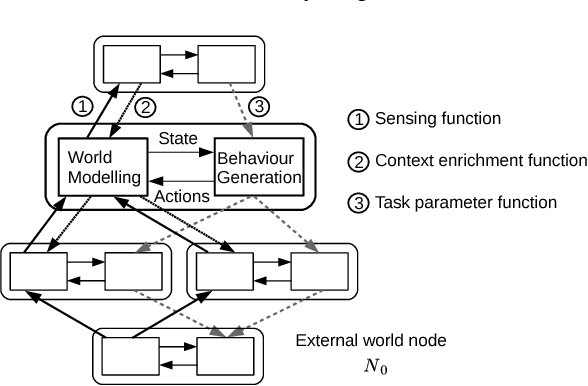
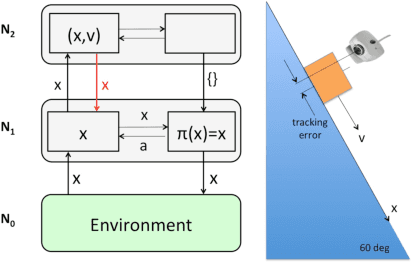
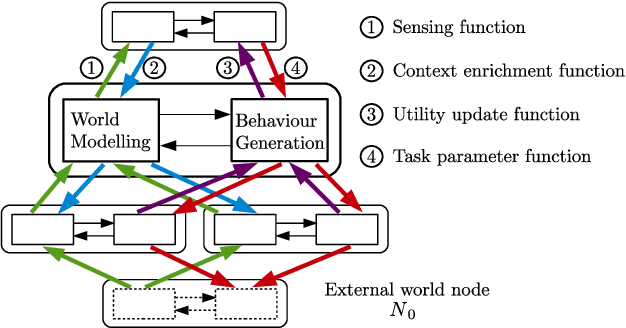
Cognition does not only depend on bottom-up sensor feature abstraction, but also relies on contextual information being passed top-down. Context is higher level information that helps to predict belief states at lower levels. The main contribution of this paper is to provide a formalisation of perceptual context and its integration into a new process model for cognitive hierarchies. Several simple instantiations of a cognitive hierarchy are used to illustrate the role of context. Notably, we demonstrate the use context in a novel approach to visually track the pose of rigid objects with just a 2D camera.
ROSoClingo: A ROS package for ASP-based robot control
Jul 28, 2013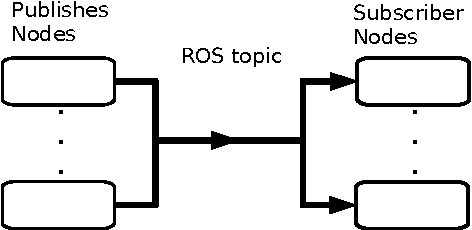
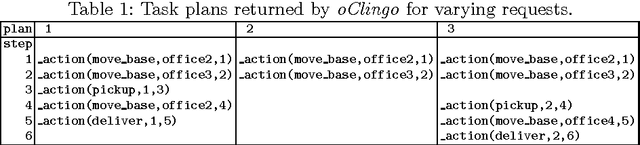
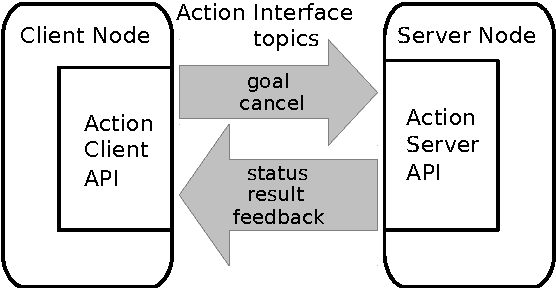

Knowledge representation and reasoning capacities are vital to cognitive robotics because they provide higher level cognitive functions for reasoning about actions, environments, goals, perception, etc. Although Answer Set Programming (ASP) is well suited for modelling such functions, there was so far no seamless way to use ASP in a robotic environment. We address this shortcoming and show how a recently developed reactive ASP system can be harnessed to provide appropriate reasoning capacities within a robotic system. To be more precise, we furnish a package integrating the reactive ASP solver oClingo with the popular open-source robotic middleware ROS. The resulting system, ROSoClingo, provides a generic way by which an ASP program can be used to control the behaviour of a robot and to respond to the results of the robot's actions.