 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Study of Belief Revision Postulates in Multi-Agent Systems (Extended Version)
May 04, 2026We investigate the belief revision problem in epistemic planning, i.e., what will be the beliefs of all agents in a multi-agent system after an agent gains the belief in some state property. Based on the standard representation in epistemic planning of agents' beliefs via a single multi-agent Kripke model, we generalize the classical AGM belief revision postulates to the multi-agent setting, with the aim to provide a formal framework for evaluating dynamic epistemic reasoning frameworks in which the beliefs of all agents as the result of actions are computed. As an example of a simple operator that satisfies all of the generalized AGM postulates, we present generalized full-meet multi-agent belief revision. We moreover define a generalization of the standard postulates for iterated revision, present a more sophisticated, event model based revision operator, and discuss the potential issues in defining an epistemic operator on Kripke models that can satisfy all of the generalized postulates for iterated multi-agent belief revision.
Hierarchically Gated Experts for Efficient Online Continual Learning
Dec 22, 2024



Continual Learning models aim to learn a set of tasks under the constraint that the tasks arrive sequentially with no way to access data from previous tasks. The Online Continual Learning framework poses a further challenge where the tasks are unknown and instead the data arrives as a single stream. Building on existing work, we propose a method for identifying these underlying tasks: the Gated Experts (GE) algorithm, where a dynamically growing set of experts allows for new knowledge to be acquired without catastrophic forgetting. Furthermore, we extend GE to Hierarchically Gated Experts (HGE), a method which is able to efficiently select the best expert for each data sample by organising the experts into a hierarchical structure. On standard Continual Learning benchmarks, GE and HGE are able to achieve results comparable with current methods, with HGE doing so more efficiently.
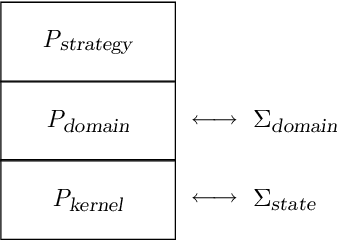
Online Learning and Planning in Cognitive Hierarchies
Oct 18, 2023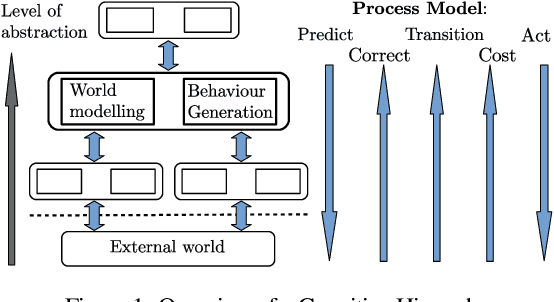
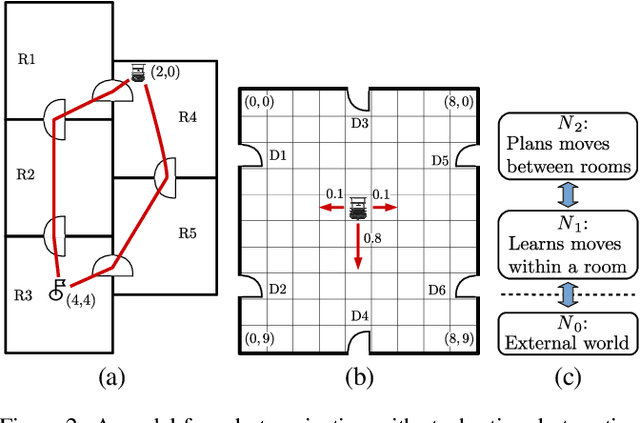
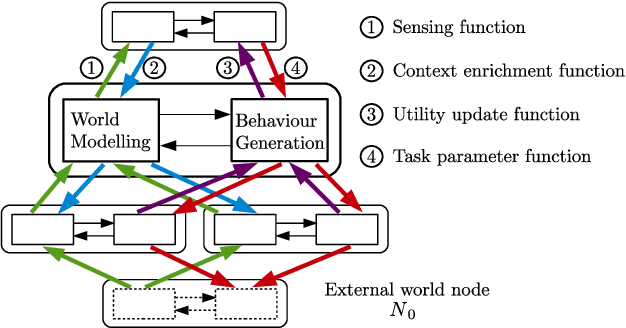
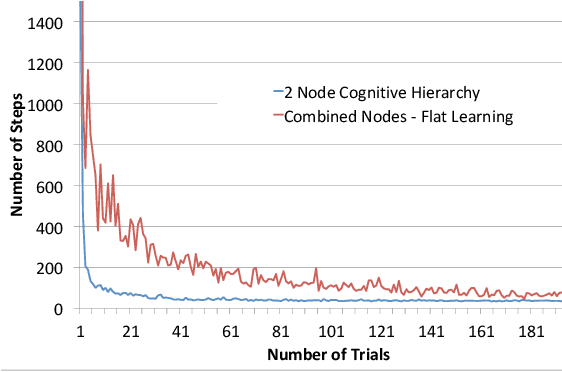
Complex robot behaviour typically requires the integration of multiple robotic and Artificial Intelligence (AI) techniques and components. Integrating such disparate components into a coherent system, while also ensuring global properties and behaviours, is a significant challenge for cognitive robotics. Using a formal framework to model the interactions between components can be an important step in dealing with this challenge. In this paper we extend an existing formal framework [Clark et al., 2016] to model complex integrated reasoning behaviours of robotic systems; from symbolic planning through to online learning of policies and transition systems. Furthermore the new framework allows for a more flexible modelling of the interactions between different reasoning components.
On Optimal Strategies for Wordle and General Guessing Games
May 16, 2023

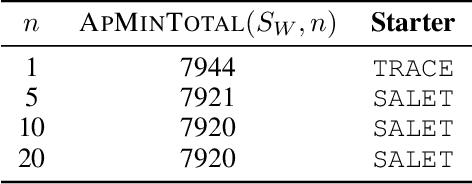

The recent popularity of Wordle has revived interest in guessing games. We develop a general method for finding optimal strategies for guessing games while avoiding an exhaustive search. Our main contributions are several theorems that build towards a general theory to prove the optimality of a strategy for a guessing game. This work is developed to apply to any guessing game, but we use Wordle as an example to present concrete results.
Perceptual Context in Cognitive Hierarchies
Jan 07, 2018
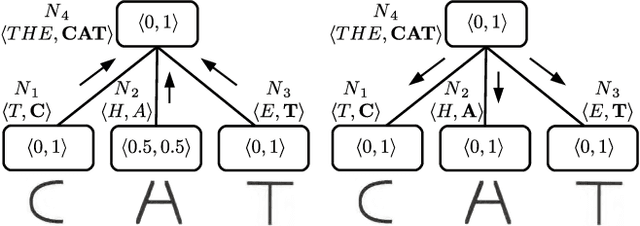
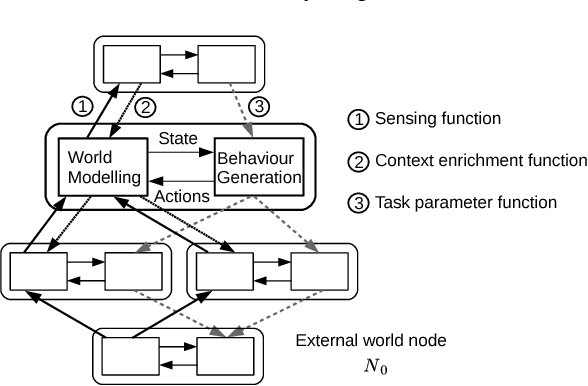
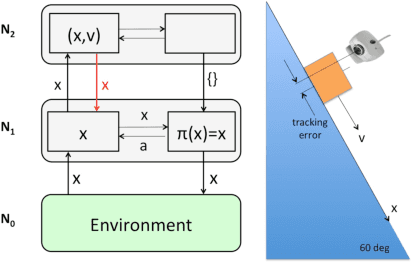
Cognition does not only depend on bottom-up sensor feature abstraction, but also relies on contextual information being passed top-down. Context is higher level information that helps to predict belief states at lower levels. The main contribution of this paper is to provide a formalisation of perceptual context and its integration into a new process model for cognitive hierarchies. Several simple instantiations of a cognitive hierarchy are used to illustrate the role of context. Notably, we demonstrate the use context in a novel approach to visually track the pose of rigid objects with just a 2D camera.
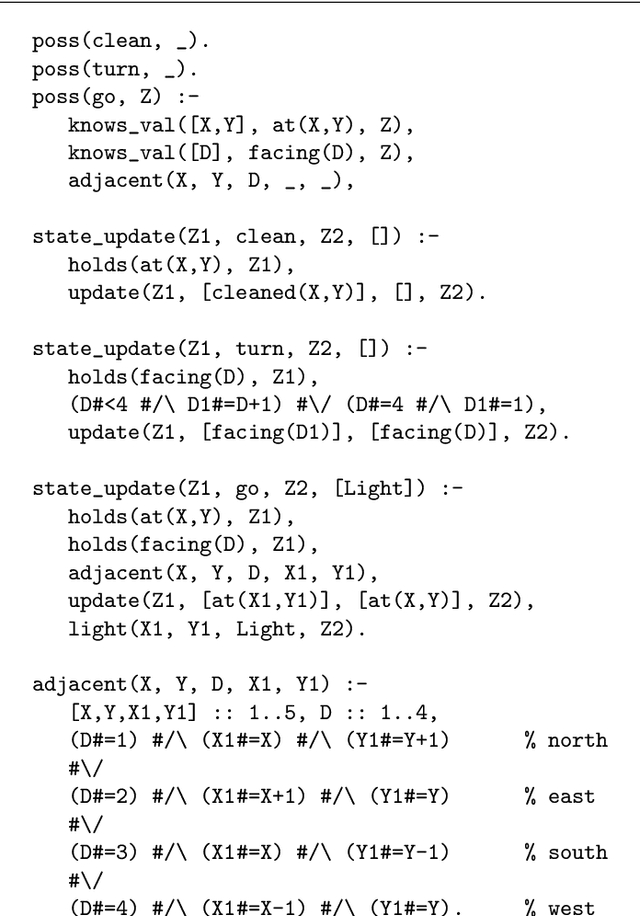
ALPprolog --- A New Logic Programming Method for Dynamic Domains
Jul 26, 2011Logic programming is a powerful paradigm for programming autonomous agents in dynamic domains, as witnessed by languages such as Golog and Flux. In this work we present ALPprolog, an expressive, yet efficient, logic programming language for the online control of agents that have to reason about incomplete information and sensing actions.
* 16 pages
FLUX: A Logic Programming Method for Reasoning Agents
Aug 19, 2004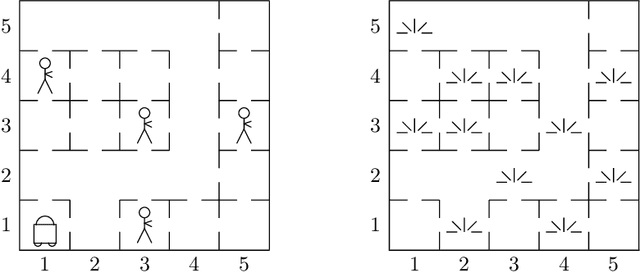
FLUX is a programming method for the design of agents that reason logically about their actions and sensor information in the presence of incomplete knowledge. The core of FLUX is a system of Constraint Handling Rules, which enables agents to maintain an internal model of their environment by which they control their own behavior. The general action representation formalism of the fluent calculus provides the formal semantics for the constraint solver. FLUX exhibits excellent computational behavior due to both a carefully restricted expressiveness and the inference paradigm of progression.