 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRouting Driverless Transport Vehicles in Car Assembly with Answer Set Programming
Apr 27, 2018
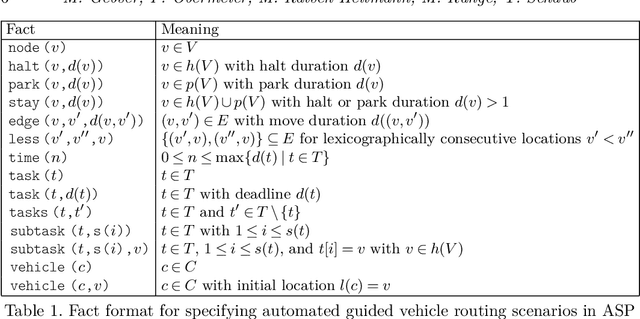
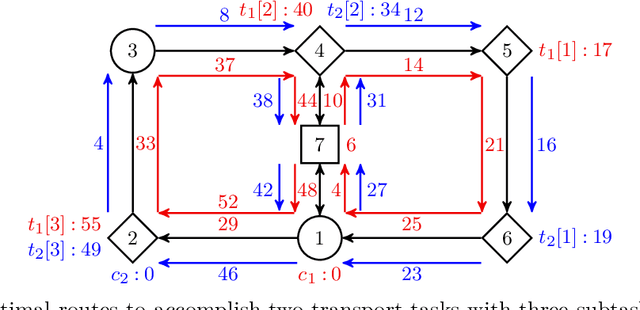

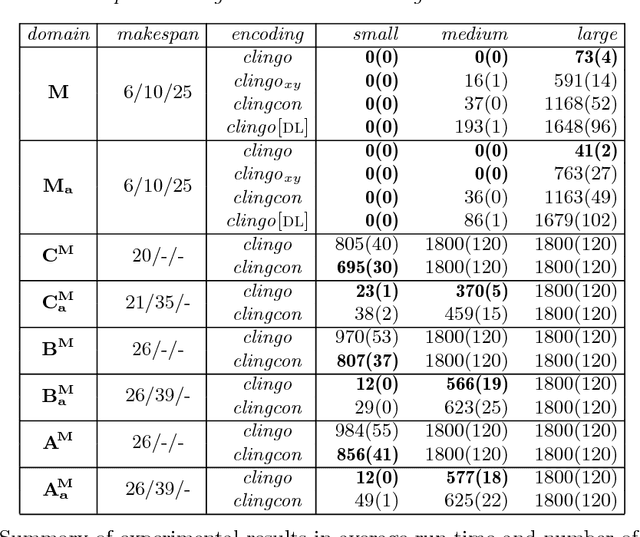
Automated storage and retrieval systems are principal components of modern production and warehouse facilities. In particular, automated guided vehicles nowadays substitute human-operated pallet trucks in transporting production materials between storage locations and assembly stations. While low-level control systems take care of navigating such driverless vehicles along programmed routes and avoid collisions even under unforeseen circumstances, in the common case of multiple vehicles sharing the same operation area, the problem remains how to set up routes such that a collection of transport tasks is accomplished most effectively. We address this prevalent problem in the context of car assembly at Mercedes-Benz Ludwigsfelde GmbH, a large-scale producer of commercial vehicles, where routes for automated guided vehicles used in the production process have traditionally been hand-coded by human engineers. Such ad-hoc methods may suffice as long as a running production process remains in place, while any change in the factory layout or production targets necessitates tedious manual reconfiguration, not to mention the missing portability between different production plants. Unlike this, we propose a declarative approach based on Answer Set Programming to optimize the routes taken by automated guided vehicles for accomplishing transport tasks. The advantages include a transparent and executable problem formalization, provable optimality of routes relative to objective criteria, as well as elaboration tolerance towards particular factory layouts and production targets. Moreover, we demonstrate that our approach is efficient enough to deal with the transport tasks evolving in realistic production processes at the car factory of Mercedes-Benz Ludwigsfelde GmbH.
Experimenting with robotic intra-logistics domains
Apr 26, 2018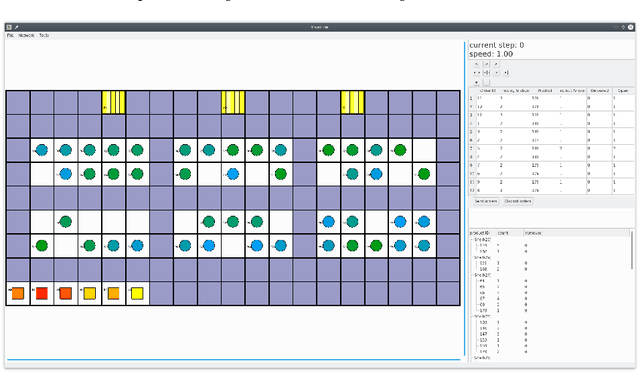
We introduce the asprilo [1] framework to facilitate experimental studies of approaches addressing complex dynamic applications. For this purpose, we have chosen the domain of robotic intra-logistics. This domain is not only highly relevant in the context of today's fourth industrial revolution but it moreover combines a multitude of challenging issues within a single uniform framework. This includes multi-agent planning, reasoning about action, change, resources, strategies, etc. In return, asprilo allows users to study alternative solutions as regards effectiveness and scalability. Although asprilo relies on Answer Set Programming and Python, it is readily usable by any system complying with its fact-oriented interface format. This makes it attractive for benchmarking and teaching well beyond logic programming. More precisely, asprilo consists of a versatile benchmark generator, solution checker and visualizer as well as a bunch of reference encodings featuring various ASP techniques. Importantly, the visualizer's animation capabilities are indispensable for complex scenarios like intra-logistics in order to inspect valid as well as invalid solution candidates. Also, it allows for graphically editing benchmark layouts that can be used as a basis for generating benchmark suites. [1] asprilo stands for Answer Set Programming for robotic intra-logistics
A System for Interactive Query Answering with Answer Set Programming
Dec 20, 2013
Reactive answer set programming has paved the way for incorporating online information into operative solving processes. Although this technology was originally devised for dealing with data streams in dynamic environments, like assisted living and cognitive robotics, it can likewise be used to incorporate facts, rules, or queries provided by a user. As a result, we present the design and implementation of a system for interactive query answering with reactive answer set programming. Our system quontroller is based on the reactive solver oclingo and implemented as a dedicated front-end. We describe its functionality and implementation, and we illustrate its features by some selected use cases.
ROSoClingo: A ROS package for ASP-based robot control
Jul 28, 2013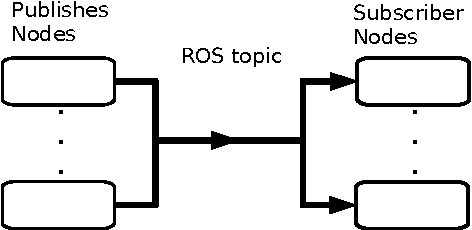
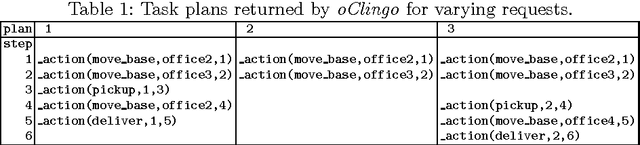
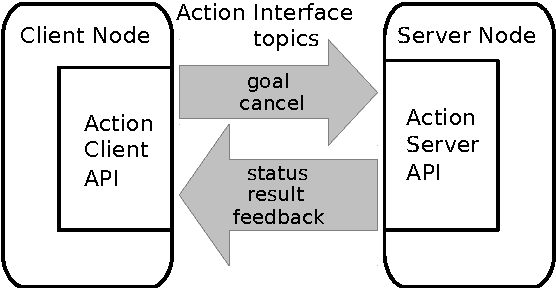

Knowledge representation and reasoning capacities are vital to cognitive robotics because they provide higher level cognitive functions for reasoning about actions, environments, goals, perception, etc. Although Answer Set Programming (ASP) is well suited for modelling such functions, there was so far no seamless way to use ASP in a robotic environment. We address this shortcoming and show how a recently developed reactive ASP system can be harnessed to provide appropriate reasoning capacities within a robotic system. To be more precise, we furnish a package integrating the reactive ASP solver oClingo with the popular open-source robotic middleware ROS. The resulting system, ROSoClingo, provides a generic way by which an ASP program can be used to control the behaviour of a robot and to respond to the results of the robot's actions.
Answer Set Programming for Stream Reasoning
Jan 08, 2013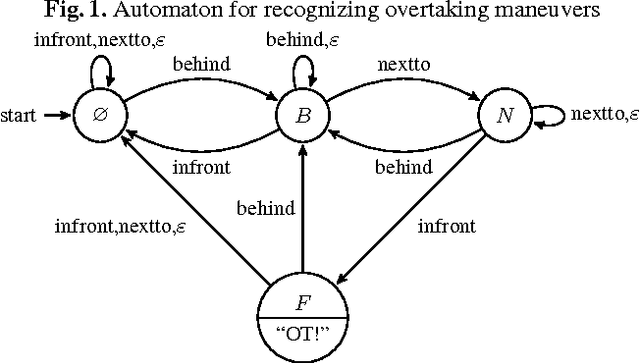
The advance of Internet and Sensor technology has brought about new challenges evoked by the emergence of continuous data streams. Beyond rapid data processing, application areas like ambient assisted living, robotics, or dynamic scheduling involve complex reasoning tasks. We address such scenarios and elaborate upon approaches to knowledge-intense stream reasoning, based on Answer Set Programming (ASP). While traditional ASP methods are devised for singular problem solving, we develop new techniques to formulate and process problems dealing with emerging as well as expiring data in a seamless way.