 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApplications of Intuitionistic Temporal Logic to Temporal Answer Set Programming
Mar 16, 2026The relationship between intuitionistic or intermediate logics and logic programming has been extensively studied, prominently featuring Pearce's equilibrium logic and Osorio's safe beliefs. Equilibrium logic admits a fixpoint characterization based on the logic of here-and-there, akin to theory completion in default and autoepistemic logics. Safe beliefs are similarly defined via a fixpoint operator, albeit under the semantics of intuitionistic or other intermediate logics. In this paper, we investigate the logical foundations of Temporal Answer Set Programming through the lens of Temporal Equilibrium Logic, a formalism combining equilibrium logic with linear-time temporal operators. We lift the seminal approaches of Pearce and Osorio to the temporal setting, establishing a formal correspondence between temporal intuitionistic logic and temporal logic programming. Our results deepen the theoretical underpinnings of Temporal Answer Set Programming and provide new avenues for research in temporal reasoning.
Common Knowledge Always, Forever
Feb 14, 2026There has been an increasing interest in topological semantics for epistemic logic, which has been shown to be useful for, e.g., modelling evidence, degrees of belief, and self-reference. We introduce a polytopological PDL capable of expressing common knowledge and various generalizations and show it has the finite model property over closure spaces but not over Cantor derivative spaces. The latter is shown by embedding a version of linear temporal logic with `past', which does not have the finite model property.
* 16 pages
Gödel-Dummett linear temporal logic
Jun 27, 2023


We investigate a version of linear temporal logic whose propositional fragment is G\"odel-Dummett logic (which is well known both as a superintuitionistic logic and a t-norm fuzzy logic). We define the logic using two natural semantics: first a real-valued semantics, where statements have a degree of truth in the real unit interval and second a `bi-relational' semantics. We then show that these two semantics indeed define one and the same logic: the statements that are valid for the real-valued semantics are the same as those that are valid for the bi-relational semantics. This G\"odel temporal logic does not have any form of the finite model property for these two semantics: there are non-valid statements that can only be falsified on an infinite model. However, by using the technical notion of a quasimodel, we show that every falsifiable statement is falsifiable on a finite quasimodel, yielding an algorithm for deciding if a statement is valid or not. Later, we strengthen this decidability result by giving an algorithm that uses only a polynomial amount of memory, proving that G\"odel temporal logic is PSPACE-complete. We also provide a deductive calculus for G\"odel temporal logic, and show this calculus to be sound and complete for the above-mentioned semantics, so that all (and only) the valid statements can be proved with this calculus.
Intuitionistic Linear Temporal Logics
Dec 30, 2019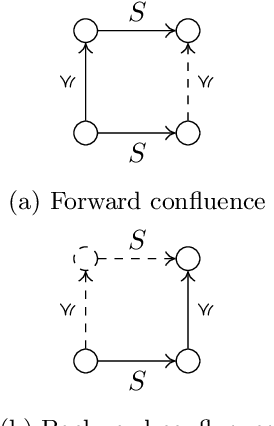
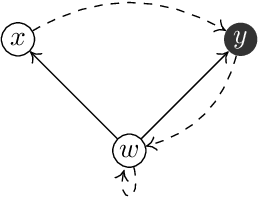


We consider intuitionistic variants of linear temporal logic with `next', `until' and `release' based on expanding posets: partial orders equipped with an order-preserving transition function. This class of structures gives rise to a logic which we denote $\iltl$, and by imposing additional constraints we obtain the logics $\itlb$ of persistent posets and $\itlht$ of here-and-there temporal logic, both of which have been considered in the literature. We prove that $\iltl$ has the effective finite model property and hence is decidable, while $\itlb$ does not have the finite model property. We also introduce notions of bounded bisimulations for these logics and use them to show that the `until' and `release' operators are not definable in terms of each other, even over the class of persistent posets.
Exploring the bidimensional space: A dynamic logic point of view
Feb 06, 2017We present a family of logics for reasoning about agents' positions and motion in the plane which have several potential applications in the area of multi-agent systems (MAS), such as multi-agent planning and robotics. The most general logic includes (i) atomic formulas for representing the truth of a given fact or the presence of a given agent at a certain position of the plane, (ii) atomic programs corresponding to the four basic orientations in the plane (up, down, left, right) as well as the four program constructs of propositional dynamic logic (sequential composition, nondeterministic composition, iteration and test). As this logic is not computably enumerable, we study some interesting decidable and axiomatizable fragments of it. We also present a decidable extension of the iteration-free fragment of the logic by special programs representing motion of agents in the plane.
Evidence and plausibility in neighborhood structures
Jul 04, 2013The intuitive notion of evidence has both semantic and syntactic features. In this paper, we develop an {\em evidence logic} for epistemic agents faced with possibly contradictory evidence from different sources. The logic is based on a neighborhood semantics, where a neighborhood $N$ indicates that the agent has reason to believe that the true state of the world lies in $N$. Further notions of relative plausibility between worlds and beliefs based on the latter ordering are then defined in terms of this evidence structure, yielding our intended models for evidence-based beliefs. In addition, we also consider a second more general flavor, where belief and plausibility are modeled using additional primitive relations, and we prove a representation theorem showing that each such general model is a $p$-morphic image of an intended one. This semantics invites a number of natural special cases, depending on how uniform we make the evidence sets, and how coherent their total structure. We give a structural study of the resulting `uniform' and `flat' models. Our main result are sound and complete axiomatizations for the logics of all four major model classes with respect to the modal language of evidence, belief and safe belief. We conclude with an outlook toward logics for the dynamics of changing evidence, and the resulting language extensions and connections with logics of plausibility change.