 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSteady-Hand Eye Robot 3.0: Optimization and Benchtop Evaluation for Subretinal Injection
Sep 06, 2023



Subretinal injection methods and other procedures for treating retinal conditions and diseases (many considered incurable) have been limited in scope due to limited human motor control. This study demonstrates the next generation, cooperatively controlled Steady-Hand Eye Robot (SHER 3.0), a precise and intuitive-to-use robotic platform achieving clinical standards for targeting accuracy and resolution for subretinal injections. The system design and basic kinematics are reported and a deflection model for the incorporated delta stage and validation experiments are presented. This model optimizes the delta stage parameters, maximizing the global conditioning index and minimizing torsional compliance. Five tests measuring accuracy, repeatability, and deflection show the optimized stage design achieves a tip accuracy of <30 $\mu$m, tip repeatability of 9.3 $\mu$m and 0.02{\deg}, and deflections between 20-350 $\mu$m/N. Future work will use updated control models to refine tip positioning outcomes and will be tested on in vivo animal models.
Human-Robot Interaction in Retinal Surgery: A Comparative Study of Serial and Parallel Cooperative Robots
Apr 01, 2023

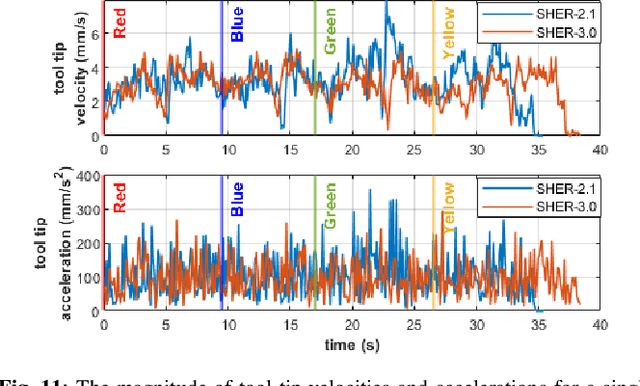

Cooperative robots for intraocular surgery allow surgeons to perform vitreoretinal surgery with high precision and stability. Several robot structural designs have shown capabilities to perform these surgeries. This research investigates the comparative performance of a serial and parallel cooperative-controlled robot in completing a retinal vessel-following task, with a focus on human-robot interaction performance and user experience. Our results indicate that despite differences in robot structure and interaction forces and torques, the two robots exhibited similar levels of performance in terms of general robot-to-patient interaction and average operating time. These findings have implications for the development and implementation of surgical robotics, suggesting that both serial and parallel cooperative-controlled robots can be effective for vitreoretinal surgery tasks.