 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFour-Arm Collaboration: Two Dual-Arm Robots Work Together to Maneuver Tethered Tools
Sep 29, 2020

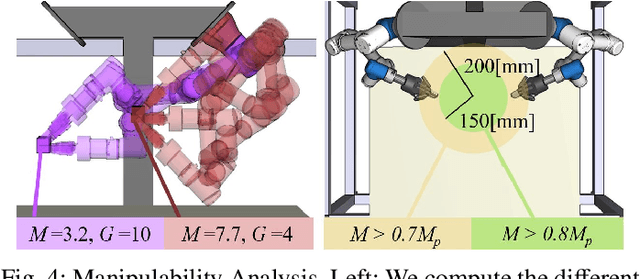
In this paper, we present a planner for a master dual-arm robot to manipulate tethered tools with an assistant dual-arm robot's help. The assistant robot provides assistance to the master robot by manipulating the tool cable and avoiding collisions. The provided assistance allows the master robot to perform tool placements on the robot workspace table to regrasp the tool, which would typically fail since the tool cable tension may change the tool positions. It also allows the master robot to perform tool handovers, which would normally cause entanglements or collisions with the cable and the environment without the assistance. Simulations and real-world experiments are performed to validate the proposed planner.
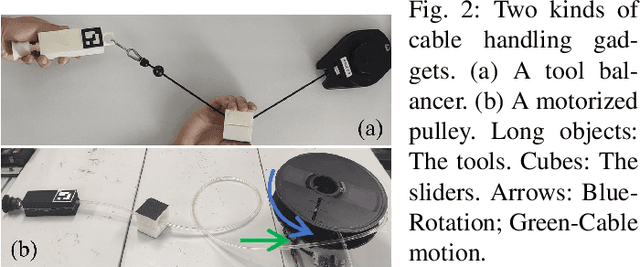
Tethered Tool Manipulation Planning with Cable Maneuvering
Sep 24, 2019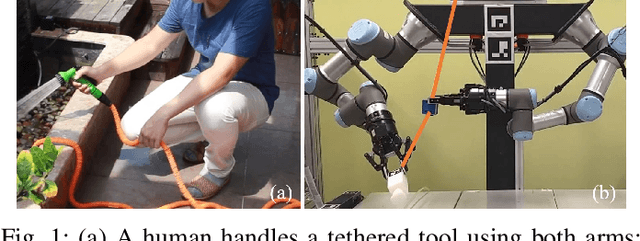


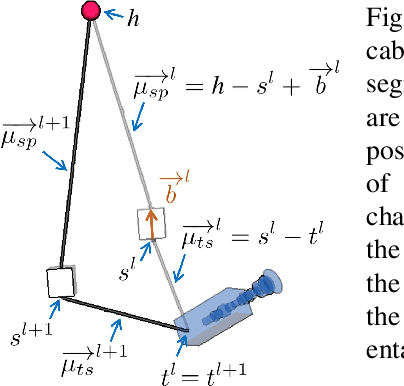
In this paper, we present a planner for manipulating tethered tools using dual-armed robots. The planner generates robot motion sequences to maneuver a tool and its cable while avoiding robot-cable entanglements. Firstly, the planner generates an Object Manipulation Motion Sequence (OMMS) to handle the tool and place it in desired poses. Secondly, the planner examines the tool movement associated with the OMMS and computes candidate positions for a cable slider, to maneuver the tool cable and avoid collisions. Finally, the planner determines the optimal slider positions to avoid entanglements and generates a Cable Manipulation Motion Sequence (CMMS) to place the slider in these positions. The robot executes both the OMMS and CMMS to handle the tool and its cable to avoid entanglements and excess cable bending. Simulations and real-world experiments help validate the proposed method.
Arm Manipulation Planning of Tethered Tools with the Help of a Tool Balancer
Dec 15, 2018
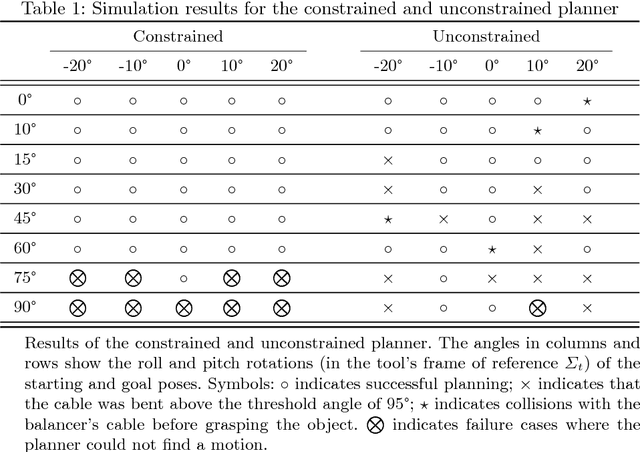

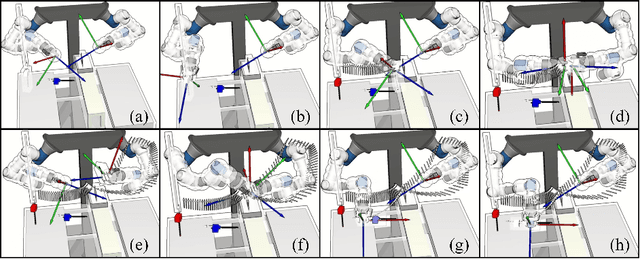
Robotic manipulation of tethered tools is widely seen in robotic work cells. They may cause excess strain on the tool's cable or undesired entanglements with the robot's arms. This paper presents a manipulation planner with cable orientation constraints for tethered tools suspended by tool balancers. The planner uses orientation constraints to limit the bending of the balancer's cable while the robot manipulates a tool and places it in a desired pose. The constraints reduce entanglements and decrease the torque induced by the cable on the robot joints. Simulation and real-world experiments show that the constrained planner can successfully plan robot motions for the manipulation of suspended tethered tools preventing the robot from damaging the cable or getting its arms entangled, potentially avoiding accidents. The planner is expected to play promising roles in manufacturing cells.
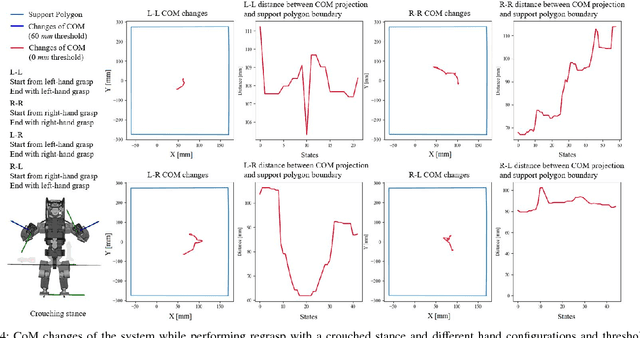
Regrasp Planning Considering Bipedal Stability Constraints
Oct 14, 2018
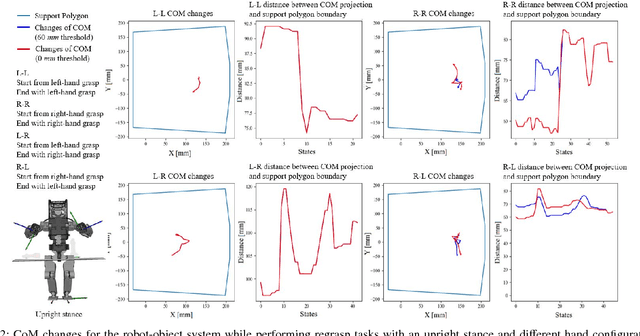
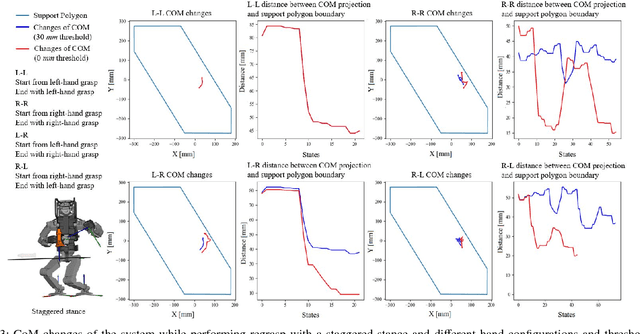
This paper presents a Center of Mass (CoM) based manipulation and regrasp planner that implements stability constraints to preserve the robot balance. The planner provides a graph of IK-feasible, collision-free and stable motion sequences, constructed using an energy based motion planning algorithm. It assures that the assembly motions are stable and prevent the robot from falling while performing dexterous tasks in different situations. Furthermore, the constraints are also used to perform an RRT-inspired task-related stability estimation in several simulations. The estimation can be used to select between single-arm and dual-arm regrasping configurations to achieve more stability and robustness for a given manipulation task. To validate the planner and the task-related stability estimations, several tests are performed in simulations and real-world experiments involving the HRP5P humanoid robot, the 5th generation of the HRP robot family. The experiment results suggest that the planner and the task-related stability estimation provide robust behavior for the humanoid robot while performing regrasp tasks.