Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFour-Arm Collaboration: Two Dual-Arm Robots Work Together to Maneuver Tethered Tools
Paper and Code
Sep 29, 2020
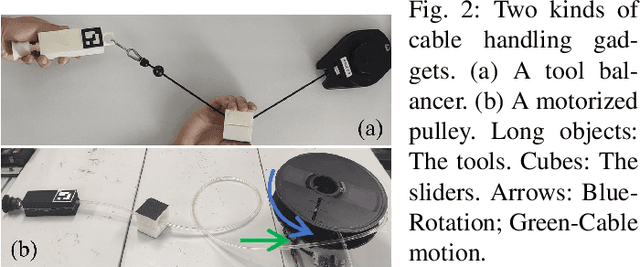

In this paper, we present a planner for a master dual-arm robot to manipulate tethered tools with an assistant dual-arm robot's help. The assistant robot provides assistance to the master robot by manipulating the tool cable and avoiding collisions. The provided assistance allows the master robot to perform tool placements on the robot workspace table to regrasp the tool, which would typically fail since the tool cable tension may change the tool positions. It also allows the master robot to perform tool handovers, which would normally cause entanglements or collisions with the cable and the environment without the assistance. Simulations and real-world experiments are performed to validate the proposed planner.
View paper on